

-
摘要: 人体肌肉骨骼系统简称肌骨系统, 包括骨骼、骨骼肌与关节连接, 其力学模型是典型的多柔体系统. 从多体动力学角度研究肌骨系统, 主要关注其在运动过程中的肌肉内力、关节力矩及产生的动力学影响, 属于动力学与生物力学的交叉融合. 肌骨系统的多体动力学模型已被广泛地应用于临床医学、竞技体育、军事训练、人机工程等诸多领域, 其仿真结果可为提高人体运动能力、降低关节载荷与能耗、避免运动损伤、加快康复进程等提供重要计算参考数据. 与此同时, 上述研究亦对肌骨动力学研究提出了许多新挑战. 本文综述了人体肌骨多柔体系统动力学相关研究进展, 包括骨骼肌功能解剖与生物力学建模、神经与肌肉控制理论、肌骨系统动力学问题与求解方法, 以及近年来肌骨多体动力学在步态分析、飞行员抗荷动作、口颌手术规划等领域的典型应用. 与工程领域的机械多体系统相比, 人体肌骨多体系统具有肌肉内力主动性与肌肉控制冗余性两大特征. 现有骨骼肌模型难以同时考虑肌肉的解剖结构、三维几何与肌力产生的生物化学机制. 已有大多数肌骨模型采用静态优化假设消除肌肉冗余性, 忽略了肌肉与肌腱内力平衡及兴奋收缩耦联机制. 此外, 目前仍缺乏实现肌骨模型个性化的无创在体测试手段. 未来, 人体肌骨多体动力学研究将会向更精确、智能、个性化的方向发展, 成为动力学与生物力学交叉的热点研究领域.Abstract: The human system consists of bones, skeletal muscles, and joints, so the system model in mechanics is a typical flexible multi-body system. The study on musculoskeletal multi-body dynamics mainly aims to determine muscle forces and joint moments together with the effect of their actions during human locomotion. Thus, it is a multi-disciplinary subject between dynamics and biomechanics. Musculoskeletal multi-body models have seen successful applications in many fields, such as clinical research, sports engineering, military training, and ergonomics. The simulation results of these models can provide important data for improving physical performances, reducing joint loading and energy consumption, preventing sports injuries, and accelerating rehabilitation processes. In turn, the achievement of these human-related techniques provides the study of musculoskeletal dynamics with numerous new challenges. This review surveys the literature on the multi-body dynamics modeling of human musculoskeletal systems. Its contents include the functional anatomy and biomechanical models of the skeletal muscle, neuromuscular control strategies, and the computational frameworks for musculoskeletal modeling. The paper also reviews several typical applications of musculoskeletal modeling in the fields of gait analysis, anti-G straining maneuver of pilots, and mandibular surgical planning. Compared with classical mechanical systems in mechanical engineering, the human musculoskeletal system has the characteristics of active force and redundancy control. However, existing muscle models cannot simultaneously consider the anatomical structures and three-dimensional geometries of the muscles together with their biochemical force-generating mechanism. Meanwhile, most studies have utilized the static optimization assumption to deal with muscle recruitments, neglecting the equilibrium between musculotendon forces and contraction dynamics. So far, It is still a challenging task to build subject-specific musculoskeletal models based on non-invasive in vivo measurements. Future studies on musculoskeletal multi-body dynamics will achieve a more precise, intelligent, and subject-specific modeling framework, which leads to a hot research topic involving interdisciplinary collaborations of dynamics and biomechanics.
-

图 1 人体肌骨系统多体动力学模型. (a) OpenSim全人体模型(Raabe & Chaudhari 2016), (b) Anybody全人体模型(Bassani et al. 2017), (c) LifeMOD全人体模型(Kia et al. 2014), (d) ArtiSynth口颌模型(Stavness et al. 2011)

图 2 人体肌骨模型典型应用场景. (a) 人工髋关节假体设计(Zhang et al. 2015), (b) 脑瘫患儿关节僵硬缓解(Van Der Krogt et al. 2016), (c) 士兵负重步态(Xiang et al. 2009), (d) 汽车座椅减振(Zhang et al. 2019a)

图 3 骨骼肌多级结构(Gotti et al. 2020)

图 4 骨骼肌Hill-Zajac模型(Zajac 1989). (a) 对称双羽状肌模型(Guo J et al. 2020b), 包括主动收缩元、被动弹性元与串联弹性元; (b) 主动与被动肌力随肌纤维长度变化曲线(Silva & Ambrósio 2003, Guo J et al. 2020a)及其与趾长伸肌 (EDL, EDII) , 胫骨前肌 (TA) 实验比较(Gollapudi & Lin 2009, Winters et al. 2011); (c) 主动肌力随肌纤维收缩速度变化曲线及其与生理学实验(Joyce et al. 1969, Mashima 1984)比较; (d) 肌腱串联弹性元肌力随肌纤维长度变化曲线(Blankevoort et al. 1991)及其与生理学实验 (Magnusson et al. 2001, Maganaris & Paul 2002)比较

图 5 肌肉与骨骼缠绕描述. (a) 起止点简单连线及通过点约束(Suderman & Vasavada 2012), (b)简单几何体障碍设置(Suderman et al. 2012)

图 6 基于非负矩阵分解(Févotte & Idier 2011), 由健康人3个步态周期提取的典型肌肉协同模式

图 8 多柔体动力学在肌骨系统建模中的应用. (a)基于浮动节点坐标描述建立的小变形股骨颈模型(Kłodowski et al. 2012), (b)柔性肱二头肌、肱三头肌模型(Gfrerer & Simeon 2021), (c)柔性膈肌模型(Guo J et al. 2021a)

图 9 基于非刚性迭代最近点方法(Amberg et al. 2007)映射肌肉附着点. (a) 基于Anybody标准口颌模型(de Zee et al. 2007)映射到患者, (b) 基于一名健康人肌肉附着区域, 映射到患者

图 10 足底接触力模型(Brown & McPhee 2018). (a)椭球接触模型, (b)实验与仿真足底压力结果比较

图 12 腹腔多柔体动力学模型(Guo J et al. 2021a). (a)躯干隔离体受力分析, (b)柔性核心肌群模型, (c)腹内压气柱模型
-
[1] 崔伟玲, 陈维毅, 王长江, 郭媛. 2019. 基于nmsBuilder和OpenSim建立个性化骨肌模型及其验证. 医用生物力学, 34: 608-614 (Cui W L, Chen W Y, Wang C J, Guo Y. 2019. Establishment and verification of personalized musculoskeletal model based on nmsBuilder and OpenSim. Journal of Medical Biomechanics, 34: 608-614).Cui W L, Chen W Y, Wang C J, Guo Y. 2019. Establishment and verification of personalized musculoskeletal model based on nmsBuilder and OpenSim, Journal of Medical Biomechanics, 34: 608-614). [2] 丁和恩. 2019. 基于李群特征和深度学习的人体动作识别研究. [硕士论文]. 重庆: 重庆邮电大学Ding H E. 2019. Research on human acttion recognition based on Lie group features and deep learning. [Master Thesis]. Chongqing: Chongqing University of Posts and Telecommunications [3] 丁其川, 熊安斌, 赵新刚, 等. 2016. 基于表面肌电的运动意图识别方法研究及应用综述. 自动化学报, 42: 13-25 (Ding Q C, Xiong A B, Zhao X G, et al. 2016. A review on researches and applications of sEMG-based motion intent recognition methods. Acta Automatica Sinica, 42: 13-25). doi: 10.16383/j.aas.2016.c140563(Ding QC, Xiong AB, Zhao XG, et al. 2016. A review on researches and applications of sEMG-based motion intent recognition methods. Acta Automatica Sinica, 42: 13-25). doi: 10.16383/j.aas.2016.c140563 [4] 董玮. 2011. 基于中枢模式发生器原理的步态控制及其运动认知的研究. [硕士论文]. 上海: 华东理工大学Dong W. 2011. Study on gait control based on CPG principle and locomotion cognition. [Master Thesis]. Shanghai: East China University of Science and Technology [5] 董玮, 王如彬, 沈恩华, 张志康. 2008. 节律性步态运动中CPG对肌肉的控制模式的仿真研究. 动力学与控制学报, 6: 327-331 (Dong W, Wang R B, Shen E H, Zhang Z K. 2008. Simulation study on the pattern of muscles controlled by cpg in rhythm gait movement. Journal of Dynamics and Control, 6: 327-331). doi: 10.3969/j.issn.1672-6553.2008.04.008(Dong W, Wang R B, Shen E H, Zhang Z K. 2008. Simulation study on the pattern of muscles controlled by cpg in rhythm gait movement. Journal of Dynamics and Control, 6: 327-331). doi: 10.3969/j.issn.1672-6553.2008.04.008 [6] 傅维杰, 刘宇. 2020. 神经生物力学增能技术前沿与进展. 医用生物力学, 35: 649-657Fu W J, Liu Y. Frontiers and progress in neuro-biomechanical ergogenic technology. Journal of Medical Biomechanics, 35: 649-657 [7] 耿喜臣, 金朝, 徐艳, 等. 2002. 新的抗荷动作: HP与PHP动作抗荷效果的评价. 中华航空航天医学杂志, 13: 209-213 (Geng X C, Jin C, Xu Y, et al. 2002. Centrifuge evaluation of the +Gz protection of the new anti-G straining maneuver: HP and PHP maneuver. Chinese Journal of Aerospace Medicine, 13: 209-213). doi: 10.3760/cma.j.issn.1007-6239.2002.04.001Geng XC, Jin C, Xu Y, et al. 2002. Centrifuge evaluation of the +Gz protection of the new anti-G straining maneuver: HP and PHP maneuver. Chinese Journal of Aerospace Medicine, 13: 209-213. doi: 10.3760/cma.j.issn.1007-6239.2002.04.001 [8] 何家玮. 2018. 高效和高稳定极限环行走的多体动力学研究. [博士论文]. 北京: 清华大学He J W. 2018. A multibody dynamics approach to efficient and robust limit cycle walking. [PhD Thesis]. Beijing: Tsinghua University [9] 洪嘉振. 1983. 人体腾空运动的数学模型. 第四届全国运动生物力学学术会议论文集(二). [10] 李翰君, 刘卉, 张新, 于冰. 2012. 膝关节肌肉力分布模拟研究. 体育科学, 32: 57-63, 69 (Li H J, Liu H, Zhang X, Yu B. 2012. Muscle force distribution model of knee joint. China Sport Science, 32: 57-63, 69). doi: 10.3969/j.issn.1000-677X.2012.11.007(Li HJ, Liu H, Zhang X, Yu B. 2012. Muscle force distribution model of knee joint. China Sport Science, 32: 57-63+69). doi: 10.3969/j.issn.1000-677X.2012.11.007 [11] 李翰君, 刘卉, 张新, 于冰. 2014a. 基于肌电和优化方法的关节肌力分布模型. 中国运动医学杂志, 33: 981-987 (Li H J, Liu H, Zhang X, Yu B. 2014a. Research on estimate of the optimum muscle parameters. Journal of Beijing Sport University, 33: 981-987). doi: 10.3969/j.issn.1000-6710.2014.10.007(Li HJ, Liu H, Zhang X, Yu B. 2014. Research on estimate of the optimum muscle parameters. Journal of Beijing Sport University, 33: 981-987). doi: 10.3969/j.issn.1000-6710.2014.10.007 [12] 李翰君, 刘卉, 张新, 于冰. 2014b. 肌肉最优参数获得方法的研究. 北京体育大学学报, 37: 71-75, 93 (Li H J, Liu H, Zhang X, Yu B. 2014b. Research on estimate of the optimum muscle parameters. Journal of Beijing Sport University, 37: 71-75, 93).(Li HJ, Liu H, Zhang X, Yu B. 2014. Research on estimate of the optimum muscle parameters. Journal of Beijing Sport University, 37: 71-75+93). [13] 李翰君, 刘嘉, 叶奎刚, 等. 2020. 速度节奏对链球成绩的影响: 优秀运动员案例研究. 北京体育大学学报, 43: 108-115 (Li H J, Liu J, Ye K G, et al. 2020. The impact of speed rhythm on hammer throw distance: A case study of an elite athlete. Journal of Beijing Sport University, 43: 108-115).(Li H J, Liu J, Ye K G, et al. 2020. The impact of speed rhythm on hammer throw distance: a case study of an elite athlete. Journal of Beijing Sport University, 43: 108-115). [14] 李娟, 唐东辉, 陈巍. 2013. 有氧运动结合抗阻训练对男性肥胖青少年心血管功能的改善及可能机制. 体育科学, 33: 37-42 (Li J, Tang D H, Chen W. 2013. The effects of aerobic combined with resistance exercise of cacrdiovascular efficiency in male obese adolescents and related mechanisms. China Sport Science, 33: 37-42). doi: 10.3969/j.issn.1000-677X.2013.11.004(Li J, Tang DH, Chen W. 2013. The effects of aerobic combined with resistance exercise of cacrdiovascular efficiency in male obese adolescents and related mechanisms. China Sport Science, 33: 37-42). doi: 10.3969/j.issn.1000-677X.2013.11.004 [15] 李旭鸿, 郝卫亚. 2018. 基于LifeMoD对跳马运动员不同踏跳位置的仿真研究. 中国运动医学杂志, 37: 15-19 (Li X H, Hao W Y. 2018. A simulation study of the different board contact position in gymnastics vaulting based on LifeMoD. Chinese Journal of Sports Medicine, 37: 15-19).(Li X H, Hao W Y. 2018. A simulation study of the different board contact position in gymnastics vaulting based on LifeMoD. Chinese Journal of Sports Medicine, 37: 15-19). [16] 李洋, 桑建兵, 敖日汗, 马钰, 魏新宇. 2021. 基于仿真和智能算法骨骼肌超弹性本构参数的反演方法研究. 力学学报, 53: 1449-1456 (Li Y, Sang J B, Ao R H, Ma Y, Wei X Y. 2021. Research on inversion method of hyperelastic constitutive parameters of skeletal muscles based on simulation and intelligent algorithm. Chinese Journal of Theoretical and Applied Mechanics, 53: 1449-1456). doi: 10.6052/0459-1879-21-038(Li Y, Sang JB, Ao RH, Ma Y, Wei XY. 2021. Research on inversion method of hyperelastic constitutive parameters of skeletal muscles based on simulation and intelligent algorithm, Chinese Journal of Theoretical and Applied Mechanics, 53: 1449-1456). doi: 10.6052/0459-1879-21-038 [17] 李永胜, 陈维毅. 2007. 单羽状骨骼肌平面模型的修正. 医用生物力学, 22: 277-281 (Li Y S, Chen W Y. 2007. Revision on the planimetric model of unipennate skeletal muscle. Journal of Medical Biomechanics, 22: 277-281).(Li Y S, Chen W Y. 2007. Revision on the planimetric model of unipennate skeletal muscle. Journal of Medical Biomechanics, 22: 277-281). [18] 栗志杰, 由小川, 柳占立, 等. 2020. 爆炸冲击波作用下颅脑损伤机理的数值模拟研究. 爆炸与冲击, 40: 015901Li Z J, Yiu X C, Liu Z L, et al. Numerical simulation of the mechanism of traumatic brain injury induced by blast shock waves, Explosion And Shock Waves, 40: 015901 [19] 林伟健, 李俊言, 陈瑱贤, 等. 2021. 正常和早期膝骨关节炎的软骨生物力学研究. 力学学报, 53: 3147-3156 (Lin W J, Li J Y, Chen Z X, Jin Z M. 2021. Biomechanical investigation of the cartilage of normal knee and early osteoarthritis knee. Chinese Journal of Theoretical and Applied Mechanics, 53: 3147-3156). doi: 10.6052/0459-1879-21-390(Lin WJ, Li JY, Chen ZX, Jin ZM. 2021. Biomechanical investigation of the cartilage of normal knee and early osteoarthritis knee. Chinese Journal of Theoretical and Applied Mechanics, 53: 3147-3156). doi: 10.6052/0459-1879-21-390 [20] 刘佳耕, 闫松华, 曾纪洲, 张宽. 2020. 全膝关节置换前后患者下肢肌骨模型步态模拟与分析. 医用生物力学, 35: 347-355 (Liu J G, Yan S H, Zeng J Z, Zhang K. 2020. Gait simulation and analysis of lower limb musculoskeletal model before and after total knee arthroplasty. Journal of Medical Biomechanics, 35: 347-355).(Liu J G, Yan S H, Zeng J Z, Zhang K. 2020. Gait simulation and analysis of lower limb musculoskeletal model before and after total knee arthroplasty, Journal of Medical Biomechanics, 35: 347-355). [21] 刘卉, 李翰君, 曲毅, 等. 2021. 无反光点人体运动自动捕捉人工智能系统的有效性. 北京体育大学学报, 44: 125-133 (Liu H, Li H J, Qu Y, et al. 2021. Validity of an artificial intelligence system for markerless human movement automatic capture. Journal of Beijing Sport University, 44: 125-133).(Liu H, Li H J, Qu Y, et al. 2021. Validity of an artificial intelligence system for markerless human movement automatic capture. Journal of Beijing Sport University, 44: 125-133). [22] 柳宁, 李俊峰, 王天舒. 2008. 用胞胞映射计算被动行走模型不动点的吸引盆. 工程力学, 25: 218-223 (Liu N, Li J F, Wang T S. 2008. Study of the basin of attraction of passive models by the aid of cell-to-cell mapping method. Engineering Mechanics, 25: 218-223). doi: 10.6052/j.issn.1000-4750.2021.06.ST02(Liu N, Li JF, Wang TS. 2008. Study of the basin of attraction of passive models by the aid of cell-to-cell mapping method. Engineering Mechanics, 25: 218-223). doi: 10.6052/j.issn.1000-4750.2021.06.ST02 [23] 梅齐昌, 顾耀东, 孙冬, 李建设. 2020. 基于影像学构建个体化 OpenSim 下肢肌骨模型的生物力学研究应用进展. 医用生物力学, 35: 259-264 (Mei Q C, Gu Y D, Sun D, Li J S. 2020. Progress on biomechanical research of image-based subject-specific opensim lower extremity musculoskeletal model. Journal of Medical Biomechanics, 35: 259-264).(Mei Q C, Gu Y D, Sun D, Li J S. 2020. Progress on biomechanical research of image-based subject-specific opensim lower extremity musculoskeletal model. Journal of Medical Biomechanics, 35: 259-264). [24] 孟祥杰, Anderson D E, 王文军, 等. 2016. 驾驶员腰部负载的计算求解与验证. 汽车工程, 38: 614-619Meng X J, Anderson D E, Wang W J, et al. 2016. Automotive Engineering, 38: 614-619 [25] 彭晨, 卢宗兴, 姚立纲, 戴飞铭. 2021. 摆幅可调型足部康复机器人的生物力学特性分析. 医用生物力学, 36: 692-697 (Chen P, Lu Z X, Yao L G, Dai F M. 2021. Analysis on biomechanical properties of foot rehabilitation robot with adjustable swing. Journal of Medical Biomechanics, 36: 692-697).Chen P, Lu ZX, Yao LG, Dai FM. 2021. Analysis on biomechanical properties of foot rehabilitation robot with adjustable swing. Journal of Medical Biomechanics, 36: 692-697. [26] 彭迎虎, 陈瑱贤, 胡家渝, 等. 2019. 人体足地接触模型的步速适用性. 医用生物力学, 34: 514-521 (Peng Y H, Chen Z X, Hu J Y, et al. 2019. Applicability of foot-ground contact model at different gait speed. Journal of Medical Biomechanics, 34: 514-521).(Peng Y H, Chen Z X, Hu J Y, et al. 2019. Applicability of foot-ground contact model at different gait speed. Journal of Medical Biomechanics, 34: 514-521). [27] 蒲放, 樊瑜波. 2013. 康复辅具设计中的生物力学研究. 医用生物力学, 28: 363-365Pu F, Fan Y B. Biomechanical research for design of rehabilitation technical aids. Journal of Medical Biomechanics, 28: 363-365 [28] 束一铭, 钱竞光, 戎科, 等. 2017. 偏瘫患者步态特征的动力学仿真分析. 医用生物力学, 32: 535-540 (Shu Y M, Qian J G, Rong K, et al. 2017. Dynamic simulation analysis on gait features of hemiplegic patients. Journal of Medical Biomechanics, 32: 535-540).Shu Y M, Qian J G, Rong K, et al. 2017. Dynamic simulation analysis on gait features of hemiplegic patients. Journal of Medical Biomechanics, 32: 535-540). [29] 宋和胜, 钱竞光, 唐潇. 2015. 基于软件OpenSim的人体运动建模理论及其应用领域概述. 医用生物力学, 30: 373-379 (Song H S, Qian J G, Tang X. 2015. Summary of software OpenSim with focus on its human motion modeling theory and application field. Journal of Medical Biomechanics, 30: 373-379). doi: 10.3871/j.1004-7220.2015.04.373Song H S, Qian J G, Tang X. 2015. Summary of software OpenSim with focus on its human motion modeling theory and application field, Journal of Medical Biomechanics, 30: 373-379). doi: 10.3871/j.1004-7220.2015.04.373 [30] 孙广艳. 2006. 人体髋关节运动生物力学模型研究. [硕士论文]. 大连: 大连理工大学Sun G Y. 2006. Biomechanics modeling of human hip joint. [Master Thesis]. Dalian: Dalian University of Technology [31] 唐刚, 王洪生, 张希安, 王成焘. 2010. 基于反向动力学的人体肌肉力预测平台. 中国组织工程研究与临床康复, 14: 6475 (Tang G, Wang H S, Zhang X A, Wang C S. 2010. Inverse dynamics-based platform for human muscle force estimation. Journal of Clinical Rehabilitative Tissue Engineering Research, 14: 6475).(Tang G, Wang H S, Zhang X A, Wang C S. 2010. Inverse dynamics-based platform for human muscle force estimation. Journal of Clinical Rehabilitative Tissue Engineering Research, 14: 6475). [32] 田强, 刘铖, 李培, 等. 2017. 多柔体系统动力学研究进展与挑战. 动力学与控制学报, 15: 385-405 (Tian Q, Liu C, Li P, et al. 2017. Advances and challenges in dynamics of flexible multibody systems. Journal of Dynamics and Control, 15: 385-405). doi: 10.6052/1672-6553-2017-039Tian Q, Liu C, Li P, et al. 2017. Advances and challenges in dynamics of flexible multibody systems. Journal of Dynamics and Control, 15: 385-405. doi: 10.6052/1672-6553-2017-039 [33] 王成焘. 2006. 中国力学虚拟人. 医用生物力学, 21: 172-178(Wang C T. Mechanical virtual human of china. Journal of Medical Biomechanics, 21: 172-178). [34] 王凡嘉, 周晨磊, 罗丽娜, 等. 2021. 亚洲蹲和西方蹲的下肢关节运动学和肌肉激活比较. 医用生物力学, 36: 705-711 (Wang F J, Zhou C L, Luo C L, et al. 2021. Comparison of the lower limb kinematics and muscle activation between Asian squat and western squat. Journal of Medical Biomechanics, 36: 705-711).(Wang FJ, Zhou CL, Luo CL, Luo LN, et al. 2021. Comparison of the lower limb kinematics and muscle activation between Asian squat and western squat. Journal of Medical Biomechanics, 36: 705-711). [35] 王晶, 陈俊鹏, 王洋, 等. 2019. 数字化下颌运动记录及咀嚼肌肌电图在下颌骨肿瘤患者口颌功能评价中的应用. 北京大学学报(医学版), 51: 571-578 (Wang J, Chen J P, Wang Y, et al. 2019. Application of digital mandibular movement record and asticatory muscle electromyography in the evaluation of stomatognathic function in patients with mandibular tumor. Journal of Peking University (Health Sciences) , 51: 571-578).Wang J, Chen J P, Wang Y, et al. 2019. Application of digital mandibular movement record and asticatory muscle electromyography in the evaluation of stomatognathic function in patients with mandibular tumor. Journal of Peking University (Health Sciences), 51: 571-578). [36] 王丽珍, 樊瑜波. 2020. 过载性损伤与防护生物力学. 力学进展, 50: 202004 (Wang L Z, Fan Y B. 2020. The biomechanics of injury and prevention. Advances in Mechanics, 50: 202004). doi: 10.6052/1000-0992-19-020(Wang L Z, Fan Y B. 2020. The biomechanics of injury and prevention. Advances in Mechanics, 50: 202004). doi: 10.6052/1000-0992-19-020 [37] 王如彬, 王毅泓, 徐旭颖, 潘晓川. 2020. 认知神经科学中蕴藏的力学思想与应用. 力学进展, 50: 202012 (Wang R B, Wang Y H, Xu X Y, Pan X C. 2020. Mechanical thoughts and applications in cognitive neuroscience. Advances In Mechanics, 50: 202012).(Wang R B, Wang Y H, Xu X Y, Pan X C. 2020. Mechanical thoughts and applications in cognitive neuroscience. Advances In Mechanics, 50: 450-505). [38] 王瑞元. 2018. 运动生理学. 北京 : 北京体育大学出版社Wang R Y. 2018. Exercise Physiology. Beijing: Beijing Sport University Press [39] 王树明. 2018. 运动技能学习与控制. 北京 : 高等教育出版社Wang S M. 2018. Motor Skill Learning and Control. Beijing: Higher Education Press [40] 王玮, 王冬梅, 李飞跃, 等. 2016. 伤科手法治疗腰椎间盘突出症的运动学研究. 中国生物医学工程学报, 35: 541-547 (Wang W, Wang D M, Li F Y, et al. 2016. Kinematic analysis of traumatology manipulation for treatment of lumbar disc herniation. Chinese Journal of Biomedical Engineering, 35: 541-547). doi: 10.3969/j.issn.0258-8021.2016.05.005Wang W, Wang D M, Li F Y, et al. 2016. Kinematic analysis of traumatology manipulation for treatment of lumbar disc herniation. Chinese Journal of Biomedical Engineering, 35: 541-547. doi: 10.3969/j.issn.0258-8021.2016.05.005 [41] 魏高峰, 白雪岭, 张希安, 等. 2009. 建立基于广义Hamilton及Lie群理论的人体骨肌系统动力学方程. 医用生物力学, 24: 276-280Wei G F, Bai X L, Zhang X A, et al. Biodynamic model of human musculoskeletal system based on the general Hamilton and Lie group theory. Journal of Medical Biomechanics, 24: 276-280 [42] 吴成亮, 郝卫亚, 肖晓飞, 等. 2016. 平衡木屈体前空翻转体180°起跳动作的计算机仿真研究. 成都体育学院学报, 42: 101-106Wu C L, Hao W Y, Xiao X F, et al. 2016. A computer simulation research on the balance beam taking off movement of Salto forward piked with 1 /2 twist. Journal of Chengdu Sport University, 42: 101-106 [43] 吴炯, 王如彬, 张志康. 2010. 基于CPG的上肢周期性运动控制的研究. 动力学与控制学报, 8: 151-154 (Wu T, Wang R B, Zhang Z K. 2010. Periodic motion control of human arm movement based on cpg model. Journal of Dynamics and Control, 8: 151-154). doi: 10.3969/j.issn.1672-6553.2010.02.013(Wu T, Wang R B, Zhang Z K. 2010. Periodic motion control of human arm movement based on cpg model. Journal of Dynamics and Control, 8: 151-154). doi: 10.3969/j.issn.1672-6553.2010.02.013 [44] 万祥林, 刘卉, 李翰君, 等. 2020. 在体股后肌群最优长度的测算方法. 医用生物力学, 35: 349-356 (Wan X L, Liu H, Li H J, et al. 2020. Estimation method for optimal length of hamstring muscles in vivo. Journal of Medical Biomechanics, 35: 349-356).(Wan X L, Liu H, Li H J, et al. 2020. Estimation method for optimal length of hamstring muscles in vivo. Journal of Medical Biomechanics, 35: 349-356). [45] 肖晓飞, 郝卫亚, 李旭鸿, 等. 2015. 基于不同刚体模型的体操落地冲击动力学比较研究. 北京体育大学学报, 38: 78-83 (Xiao X F, Hao W Y, Li J H, et al. 2015. Comparative study on impact dynamics of floor exercise landing based on different rigid-body models. Journal of Beijing Sport University, 38: 78-83).Xiao X F, Hao W Y, Li J H, et al. 2015. Comparative study on impact dynamics of floor exercise landing based on different rigid-body models. Journal of Beijing Sport University, 38: 78-83. [46] 杨毅, 彭玉鑫, 郝增明, 等. 2020. 复杂人体运动冗余控制的肌肉协同理论研究进展与展望. 体育科学, 40: 63-72 (Yang Y, Peng Y X, Hao Z M, et al. 2020. Research progress and prospect of muscle synergies theory for redundancy control of complex human movement. China Sport Science, 40: 63-72).(Yang Y, Peng Y X, Hao Z M, et al. 2020. Research progress and prospect of muscle synergies theory for redundancy control of complex human movement. China Sport Science, 40: 63-72). [47] 尹顺禹, 许艺, 岑诺, 金飘飘, 李铁风. 2020. 软体智能机器人的系统设计与力学建模. 力学进展, 50: 202006 (Yin SY, Xu Y, Cen N, Jin PP, Li TF. 2020. System design and mechanical modeling of soft smart robots. Advances in Mechanics, 50: 202006). doi: 10.6052/1000-0992-19-017(Yin SY, Xu Y, Cen N, Jin PP, Li TF. 2020. System design and mechanical modeling of soft smart robots. Advances in Mechanics, 50: 202006). doi: 10.6052/1000-0992-19-017 [48] 张佳俊, 张舒, 徐鉴. 2021. 下肢康复外骨骼人机耦合动力学建模与控制. 动力学与控制学报, 19: 55-63 (Zhang J J, Zhang S, Xu J. 2021. Human-machine coupled dynamic modelling and control of lower limb exoskeleton for rehabilitation. Journal of Dynamics and Control, 19: 55-63).(Zhang J J, Zhang S, Xu J. 2021. Human-machine coupled dynamic modelling and control of lower limb exoskeleton for rehabilitation. Journal of Dynamics and Control, 19: 55-63). [49] 赵梦文, 胡志刚, 王新征, 付东辽. 2021. 基于AnyBody脑卒中患者手部抓握训练的肌肉力学特性分析. 医用生物力学, 36: 698-704Zhao M W, Hu Z G, Wang X Z, Fu D L. Analysis on muscle mechanical properties of stroke patients’ hand grasping training based on AnyBody. Journal of Medical Biomechanics, 36: 698-704 [50] 郑思竞. 1983. 人体解剖学. 北京 : 人民卫生出版社Zheng S J. 1983. Human Anatomy. Beijing: People's Medical Publishing House [51] 郑家伟, 李金忠, 涂文勇, 等. 2010. 口腔颌面部恶性肿瘤治疗指南. 中国口腔颌面外科杂志, 3: 395-403 (Zheng J W, Li J Z, Tu W Y, et al. 2010. The protocol of treatment guideline for oral and maxillofacial malignant neoplasms. Chinese Journal of Practical Stomatology, 3: 395-403).(Zheng JW, Li JZ, Tu WY, et al. 2010. The protocol of treatment guideline for oral and maxillofacial malignant neoplasms. Chinese Journal of Practical Stomatology, 03: 395-403). [52] Ackermann M, van den Bogert A J. 2010. Optimality principles for model-based prediction of human gait. J Biomech, 43: 1055-1060. doi: 10.1016/j.jbiomech.2009.12.012 [53] Adstrum S, Hedley G, Schleip R, et al. 2017. Defining the fascial system. J Bodyw Mov Ther, 21: 173-177. doi: 10.1016/j.jbmt.2016.11.003 [54] Ahmadzadeh H, Freedman B R, Connizzo B K, et al. 2015. Micromechanical poroelastic finite element and shear-lag models of tendon predict large strain dependent Poisson’s ratios and fluid expulsion under tensile loading. Acta Biomater, 22: 83-91. doi: 10.1016/j.actbio.2015.04.035 [55] Akhavanfar M H, Brandon S C E, Brown S H M, Graham R B. 2019. Development of a novel MATLAB-based framework for implementing mechanical joint stability constraints within OpenSim musculoskeletal models. J Biomech, 91: 61-68. doi: 10.1016/j.jbiomech.2019.05.007 [56] Al Nazer R, Klodowski A, Rantalainen T, et al. 2011. A full body musculoskeletal model based on flexible multibody simulation approach utilised in bone strain analysis during human locomotion. Comput Methods Biomech Biomed Engin, 14: 573-579. doi: 10.1080/10255842.2010.488223 [57] Al Nazer R, Klodowski A, Rantalainen T, et al. 2008. Analysis of dynamic strains in tibia during human locomotion based on flexible multibody approach integrated with magnetic resonance imaging technique. Multibody Syst Dyn, 20: 287-306. doi: 10.1007/s11044-008-9120-8 [58] Albertus-Kajee Y, Tucker R, Derman W, et al. 2010. Alternative methods of normalising EMG during cycling. J Electromyogr Kinesiol, 20: 1036-1043. doi: 10.1016/j.jelekin.2010.07.011 [59] Alizadeh M, Knapik G G, Mageswaran P, et al. 2020. Biomechanical musculoskeletal models of the cervical spine: A systematic literature review. Clin Biomech, 71: 115-124. [60] Allinger T L, Epstein M, Herzog W. 1996. Stability of muscle fibers on the descending limb of the force-length relation. A theoretical consideration. J Biomech, 29: 627-633. doi: 10.1016/0021-9290(95)00087-9 [61] Al-Shuka H F N, Allmendinger F, Corves B, et al. 2014. Modeling, stability and walking pattern generators of biped robots: a review. Robotica, 32: 907-934. doi: 10.1017/S0263574713001124 [62] Amberg B, Romdhani S, Vetter T. 2007. Optimal step nonrigid ICP algorithms for surface registration. Proc IEEE Comput Soc Conf Comput Vis Pattern Recognit, 1-8. [63] An K-N, Hui F C, Morrey B F, et al. 1981. Muscles across the elbow joint: a biomechanical analysis. J Biomech, 14: 659-669. doi: 10.1016/0021-9290(81)90048-8 [64] Anderson F C, Pandy M G. 2001a. Dynamic optimization of human walking. J Biomech Eng, 123: 381-390. doi: 10.1115/1.1392310 [65] Anderson F C, Pandy M G. 1999. A dynamic optimization solution for vertical jumping in three dimensions. Comput Methods Biomech Biomed Engin, 2: 201-231. doi: 10.1080/10255849908907988 [66] Anderson F C, Pandy M G. 2001b. Static and dynamic optimization solutions for gait are practically equivalent. J Biomech, 34: 153-161. doi: 10.1016/S0021-9290(00)00155-X [67] Andersen M S, Damsgaard M, MacWilliams B, et al. 2010. A computationally efficient optimisation-based method for parameter identification of kinematically determinate and over-determinate biomechanical systems. Comput Methods Biomech Biomed Engin, 13: 171-183. [68] Andersen M S, de Zee M, Damsgaard M, et al. 2017. Introduction to force-dependent kinematics: Theory and application to mandible modeling. J Biomech Eng, 139: 091001. doi: 10.1115/1.4037100 [69] Arjmand N, Gagnon D, Plamondon A, et al. 2010. A comparative study of two trunk biomechanical models under symmetric and asymmetric loadings. J Biomech, 43: 485-491. doi: 10.1016/j.jbiomech.2009.09.032 [70] Arjmand N, Plamondon A, Shirazi-Adl A, et al. 2011. Predictive equations to estimate spinal loads in symmetric lifting tasks. J Biomech, 44: 84-91. doi: 10.1016/j.jbiomech.2010.08.028 [71] Arjmand N, Shirazi-Adl A. 2006a. Role of intra-abdominal pressure in the unloading and stabilization of the human spine during static lifting tasks. Eur Spine J, 15: 1265-1275. doi: 10.1007/s00586-005-0012-9 [72] Arjmand N, Shirazi-Adl A. 2006b. Model and in vivo studies on human trunk load partitioning and stability in isometric forward flexions. J Biomech, 39: 510-521. doi: 10.1016/j.jbiomech.2004.11.030 [73] Arjmand N, Shirazi-Adl A. 2005. Biomechanics of changes in lumbar posture in static lifting. Spine (Phila Pa 1976) , 30: 2637-2648. doi: 10.1097/01.brs.0000187907.02910.4f [74] Arjmand N, Shirazi-Adl A, Bazrgari B. 2006. Wrapping of trunk thoracic extensor muscles influences muscle forces and spinal loads in lifting tasks. Clin Biomech, 21: 668-675. doi: 10.1016/j.clinbiomech.2006.03.006 [75] Arshad R, Zander T, Dreischarf M, Schmidt H. 2016. Influence of lumbar spine rhythms and intra-abdominal pressure on spinal loads and trunk muscle forces during upper body inclination. Med Eng Phys, 38: 333-338. doi: 10.1016/j.medengphy.2016.01.013 [76] Arun K S, Huang T S, Blostein S D. 1987. Least-squares fitting of two 3-D point sets. IEEE Trans Pattern Anal Mach Intell PAMI-9, 698-700. [77] Aurbach M, Špička J, Süß F, et al. 2020. Torus obstacle method as a wrapping approach of the deltoid muscle group for humeral abduction in musculoskeletal simulation. J Biomech, 109: 109864. doi: 10.1016/j.jbiomech.2020.109864 [78] Ayusawa K, Venture G, Nakamura Y. 2011. Real-time implementation of physically consistent identification of human body segments//2011 IEEE International Conference on Robotics and Automation: 6282-6287. [79] Azizi E, Brainerd E L, Roberts T J. 2008. Variable gearing in pennate muscles. Proc Natl Acad Sci, 105: 1745-1750. doi: 10.1073/pnas.0709212105 [80] Bae T S, Loan P, Choi K, et al. 2010. Estimation of muscle response using three-dimensional musculoskeletal models before impact situation: A simulation study. J Biomech Eng, 132: 121011. [81] Baer S M, Rinzel J. 1991. Propagation of dendritic spikes mediated by excitable spines: a continuum theory. J Neurophysiol, 65: 874-890. doi: 10.1152/jn.1991.65.4.874 [82] Bahl J S, Zhang J, Killen B A, et al. 2019. Statistical shape modelling versus linear scaling: effects on predictions of hip joint centre location and muscle moment arms in people with hip osteoarthritis. J Biomech, 85: 164-172. doi: 10.1016/j.jbiomech.2019.01.031 [83] Bakke D, Besier T. 2020. Shape model constrained scaling improves repeatability of gait data. J Biomech, 107: 109838. doi: 10.1016/j.jbiomech.2020.109838 [84] Balzerson D, Banerjee J, McPhee J. 2016. A three-dimensional forward dynamic model of the golf swing optimized for ball carry distance. Sports Eng, 19: 237-250. doi: 10.1007/s12283-016-0197-7 [85] Bamman M M, Ingram S G, Caruso J F, et al. 1997. Evaluation of surface electromyography during maximal voluntary contraction. Strength Cond J, 11: 68-72. [86] Baskin R J, Paolini P J. 1967. Volume change and pressure development in muscle during contraction. Am J Physiol Content, 213: 1025-1030. doi: 10.1152/ajplegacy.1967.213.4.1025 [87] Bassani T, Stucovitz E, Qian Z, et al. 2017. Validation of the AnyBody full body musculoskeletal model in computing lumbar spine loads at L4L5 level. J Biomech, 58: 89-96. doi: 10.1016/j.jbiomech.2017.04.025 [88] Bayer A, Schmitt S, Günther M, Haeufle D F B. 2017. The influence of biophysical muscle properties on simulating fast human arm movements. Comput Methods Biomech Biomed Engin, 20: 803-821. doi: 10.1080/10255842.2017.1293663 [89] Bencsik L, Zelei A. 2017. Effects of human running cadence and experimental validation of the bouncing ball model. Mech Syst Signal Process, 89: 78-87. doi: 10.1016/j.ymssp.2016.08.001 [90] Benedetti M G, Montanari E, Catani F, et al. 2003. Pre-operative planning and gait analysis of total hip replacement following hip fusion. Comput Methods Programs Biomed, 70: 215-221. [91] Benoussaad M, Poignet P, Hayashibe M, et al. 2013. Experimental parameter identification of a multi-scale musculoskeletal model controlled by electrical stimulation: application to patients with spinal cord injury. Med Biol Eng Comput, 51: 617-631. doi: 10.1007/s11517-013-1032-y [92] Bergmann G, Bender A, Dymke J, et al. 2016. Standardized loads acting in hip implants. PLoS One, 11: e0155612. doi: 10.1371/journal.pone.0155612 [93] Bergmann G, Bergmann G, Deuretzabacher G, et al. 2001. Hip forces and gait patterns from rountine activities. J Biomech, 34: 859-871. doi: 10.1016/S0021-9290(01)00040-9 [94] Bernabei M, Maas H, van Dieën J H. 2016. A lumped stiffness model of intermuscular and extramuscular myofascial pathways of force transmission. Biomech Model Mechanobiol, 15: 1747-1763. doi: 10.1007/s10237-016-0795-0 [95] Bernstein N. 1966. The co-ordination and regulation of movements. Oxford: Pergamon press. [96] Blankevoort L, Kuiper J H, Huiskes R, Grootenboer H J. 1991. Articular contact in a three-dimensional model of the knee. J Biomech, 24: 1019-1031. doi: 10.1016/0021-9290(91)90019-J [97] Bottasso C L, Prilutsky B I, Croce A, et al. 2006. A numerical procedure for inferring from experimental data the optimization cost functions using a multibody model of the neuro-musculoskeletal system. Multibody Syst Dyn, 16: 123-154. doi: 10.1007/s11044-006-9019-1 [98] Brown P, McPhee J. A 3D ellipsoidal volumetric foot–ground contact model for forward dynamics. Multibody Syst Dyn, 2018, 42: 447-467. [99] Bruno A G, Bouxsein M L, Anderson D E. 2015. Development and validation of a musculoskeletal model of the fully articulated thoracolumbar spine and rib cage. J Biomech Eng, 137: 081003. doi: 10.1115/1.4030408 [100] Bruno A G, Mokhtarzadeh H, Allaire B T, et al. 2017. Incorporation of CT-based measurements of trunk anatomy into subject-specific musculoskeletal models of the spine influences vertebral loading predictions. J Orthop Res, 35: 2164-2173. doi: 10.1002/jor.23524 [101] Brüls O, Cardona A, Arnold M. 2012. Lie group generalized-α time integration of constrained flexible multibody systems. Mech Mach Theory, 48: 121-137. doi: 10.1016/j.mechmachtheory.2011.07.017 [102] Buchanan T S, Lloyd D G, Manal K, Besier T F. 2005. Estimation of muscle forces and joint moments using a forward-inverse dynamics model. Med Sci Sports Exerc, 37: 1911-1916. doi: 10.1249/01.mss.0000176684.24008.6f [103] Carbone V, Fluit R, Pellikaan P, et al. 2015. TLEM 2.0 - A comprehensive musculoskeletal geometry dataset for subject-specific modeling of lower extremity. J Biomech, 48: 734-741. doi: 10.1016/j.jbiomech.2014.12.034 [104] Chen L, Qi Z H. 2009. A 2-dimensional multi rigid bodies skiing model. Multibody Syst Dyn, 21: 91-98. doi: 10.1007/s11044-008-9129-z [105] Chen Z, Zhang Z, Wang L, et al. 2016a. Evaluation of a subject-specific musculoskeletal modelling framework for load prediction in total knee arthroplasty. Med Eng Phys, 38: 708-716. doi: 10.1016/j.medengphy.2016.04.010 [106] Cheng R, Sui Y, Sayenko D, Burdick JW. 2019. Motor control after human SCI through activation of muscle synergies under spinal cord stimulation. IEEE Trans Neural Syst Rehabil Eng, 27: 1331-1340. doi: 10.1109/TNSRE.2019.2914433 [107] Cheung V C K, Turolla A, Agostini M, et al. 2012. Muscle synergy patterns as physiological markers of motor cortical damage. Proc Natl Acad Sci U S A, 109: 14652-14656. doi: 10.1073/pnas.1212056109 [108] Chiovetto E, Berret B, Delis I, et al. 2013. Investigating reduction of dimensionality during single-joint elbow movements: A case study on muscle synergies. Front Comput Neurosci, 7: 11. [109] Cholewicki J, Ivancic P C, Radebold A. 2002. Can increased intra-abdominal pressure in humans be decoupled from trunk muscle co-contraction during steady state isometric exertions. Eur J Appl Physiol, 87: 127-133. doi: 10.1007/s00421-002-0598-0 [110] Cholewicki J, Juluru K, McGill S M. 1999. Intra-abdominal pressure mechanism for stabilizing the lumbar spine. J Biomech, 32: 13-17. doi: 10.1016/S0021-9290(98)00129-8 [111] Christophy M, Curtin M, Faruk Senan N A, et al. 2013. On the modeling of the intervertebral joint in multibody models for the spine. Multibody Syst Dyn, 30: 413-432. doi: 10.1007/s11044-012-9331-x [112] Christophy M, Faruk Senan N A, Lotz J C, O’Reilly O M. 2012. A Musculoskeletal model for the lumbar spine. Biomech Model Mechanobiol, 11: 19-34. doi: 10.1007/s10237-011-0290-6 [113] Chumacero-Polanco E, Yang J. 2020. Effect of disturbances and sensorimotor deficits on the postural robustness of an ankle–hip model of balance on a balance board. Nonlinear Dyn, 99: 1959-1973. doi: 10.1007/s11071-019-05403-w [114] Correa T A, Pandy M G. 2011. A mass-length scaling law for modeling muscle strength in the lower limb. J Biomech, 44: 2782-2789. doi: 10.1016/j.jbiomech.2011.08.024 [115] Creath R, Kiemel T, Horak F, et al. 2005. A unified view of quiet and perturbed stance: simultaneous co-existing excitable modes. Neurosci Lett, 377: 75-80. doi: 10.1016/j.neulet.2004.11.071 [116] Curtis D A, Plesh O, Hannam A G, et al. 1999. Modeling of jaw biomechanics in the reconstructed mandibulectomy patient. J Prosthet Dent, 81: 167-173. doi: 10.1016/S0022-3913(99)70244-1 [117] Daggfeldt K, Thorstensson A. 1997. The role of intra-abdominal pressure in spinal unloading. J Biomech, 30: 1149-1155. doi: 10.1016/S0021-9290(97)00096-1 [118] Danneskiold-Samsøe B, Bartels E M, Bülow P M, et al. 2009. Isokinetic and isometric muscle strength in a healthy population with special reference to age and gender. Acta Physiol, 197: 1-68. [119] Davy D T, Audu M L. 1987. A dynamic optimization technique for predicting muscle forces in the swing phase of gait. J Biomech, 20: 187-201. doi: 10.1016/0021-9290(87)90310-1 [120] de Groote F, Kinney A L, Rao A V., Fregly B J. 2016. Evaluation of direct collocation optimal control problem formulations for solving the muscle redundancy problem. Ann Biomed Eng, 44: 2922-2936. doi: 10.1007/s10439-016-1591-9 [121] de Groote F, Pipeleers G, Jonkers I, et al. 2009. A physiology based inverse dynamic analysis of human gait: Potential and perspectives. Comput Methods Biomech Biomed Engin, 12: 563-574. doi: 10.1080/10255840902788587 [122] de Zee M, Hansen L, Wong C, et al. 2007. A generic detailed rigid-body lumbar spine model. J Biomech, 40: 1219-1227. doi: 10.1016/j.jbiomech.2006.05.030 [123] Delp S L, Loan J P P, Hoy M G G, et al. 1990. An interactive graphics-based model of the lower extremity to study orthopedic surgical procedures. IEEE Trans Biomed Eng, 37: 757-767. doi: 10.1109/10.102791 [124] Delp S L, Anderson F C, Arnold A S, et al. 2007. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE. Trans Biomed Eng, 54: 1940-1950. doi: 10.1109/TBME.2007.901024 [125] Dembia C L, Bianco N A, Falisse A, et al. 2020. OpenSim Moco: Musculoskeletal optimal control. PLoS Comput Biol, 16: e1008493. doi: 10.1371/journal.pcbi.1008493 [126] Desailly E, Sardain P, Khouri N, et al. 2010. The convex wrapping algorithm: A method for identifying muscle paths using the underlying bone mesh. J Biomech, 43: 2601-2607. doi: 10.1016/j.jbiomech.2010.05.005 [127] Dick T J M, Wakeling J M. 2018. Geometric models to explore mechanisms of dynamic shape change in skeletal muscle. R Soc Open Sci, 5: 172371. doi: 10.1098/rsos.172371 [128] Dicker G J, Tuijt M, Koolstra J H, et al. 2012. Static and dynamic loading of mandibular condyles and their positional changes after bilateral sagittal split advancement osteotomies. Int J Oral Maxillofac Surg, 41: 1131-1136. doi: 10.1016/j.ijom.2012.03.013 [129] Dickerson C R, Chaffin D B, Hughes R E. 2007. A mathematical musculoskeletal shoulder model for proactive ergonomic analysis. Comput Methods Biomech Biomed Engin, 10: 389-400. doi: 10.1080/10255840701592727 [130] Dingwell J B, Cusumano J P, Cavanagh P R, et al. 2001. Local dynamic stability versus kinematic variability of continuous overground and treadmill walking. J Biomech Eng, 123: 27-32. doi: 10.1115/1.1336798 [131] do Carmo Carvalhais V O, de Melo Ocarino J, Araújo V L, et al. 2013. Myofascial force transmission between the latissimus dorsi and gluteus maximus muscles: An in vivo experiment. J Biomech, 46: 1003-1007. doi: 10.1016/j.jbiomech.2012.11.044 [132] Doehring T C, Freed A D, Carew E O, Vesely I. 2005. Fractional order viscoelasticity of the aortic valve cusp: An alternative to quasilinear viscoelasticity. J Biomech Eng, 127: 700-708. doi: 10.1115/1.1933900 [133] Dreischarf M, Shirazi-Adl A, Arjmand N, et al. 2016. Estimation of loads on human lumbar spine: A review of in vivo and computational model studies. J Biomech, 49: 833-845. doi: 10.1016/j.jbiomech.2015.12.038 [134] Dumas R, Camomilla V, Bonci T, et al. 2014a. Generalized mathematical representation of the soft tissue artefact. J Biomech, 47: 476-481. doi: 10.1016/j.jbiomech.2013.10.034 [135] Dumas R, Camomilla V, Bonci T, et al. 2014b. A qualitative analysis of soft tissue artefact during running. Comput Methods Biomech Biomed Engin, 17: 124-125. doi: 10.1080/10255842.2014.931518 [136] Dumas R, Jacquelin E. 2017. Stiffness of a wobbling mass models analysed by a smooth orthogonal decomposition of the skin movement relative to the underlying bone. J Biomech, 62: 47-52. [137] Durandau G, Farina D, Sartori M. 2018. Robust real-time musculoskeletal modeling driven by electromyograms. IEEE Trans Biomed Eng, 65: 556-564. doi: 10.1109/TBME.2017.2704085 [138] Erdemir A, Bennetts C, Bonner T, et al. 2015. Open Knee (s): Founding data for next generation knee models//BMES/FDA, Frontiers in Medical Devices Conference: Innovations in Modeling and Simulation [139] Eskinazi I, Fregly B J. 2015a. An open-source toolbox for surrogate modeling of joint contact mechanics. IEEE Trans Biomed Eng, 63: 269-277. [140] Eskinazi I, Fregly B J. 2015b. Surrogate modeling of deformable joint contact using artificial neural networks. Med Eng Phys, 37: 885-891. doi: 10.1016/j.medengphy.2015.06.006 [141] Ezati M, Brown P, Ghannadi B, McPhee J. 2020. Comparison of direct collocation optimal control to trajectory optimization for parameter identification of an ellipsoidal foot-ground contact model. Multibody Syst Dyn, 49: 71-93. doi: 10.1007/s11044-020-09731-3 [142] Favre P, Gerber C, Snedeker J G. 2010. Automated muscle wrapping using finite element contact detection. J Biomech, 43: 1931-1940. doi: 10.1016/j.jbiomech.2010.03.018 [143] Febrer-Nafría M, Pallarès-López R, Fregly B J, Font-Llagunes J M. 2021. Prediction of three-dimensional crutch walking patterns using a torque-driven model. Multibody Syst Dyn, 51: 1-19. doi: 10.1007/s11044-020-09751-z [144] Févotte C, Idier J. 2011. Algorithms for nonnegative matrix factorization with the β-divergence. Neural Comput, 23: 2421-2456. doi: 10.1162/NECO_a_00168 [145] Fink R N, Lembo A J. 2001. Intestinal gas. Curr Treat Options Gastroenterol, 4: 333-337. doi: 10.1007/s11938-001-0059-6 [146] Fitts R H. 2008. The cross-bridge cycle and skeletal muscle fatigue. J Appl Physiol, 104: 551-558. doi: 10.1152/japplphysiol.01200.2007 [147] Fluit R, Andersen M S, Kolk S, et al. 2014. Prediction of ground reaction forces and moments during various activities of daily living. J Biomech, 47: 2321-2329. doi: 10.1016/j.jbiomech.2014.04.030 [148] Frankenfield D C, Rowe W A, Cooney R N, et al. 2001. Limits of body mass index to detect obesity and predict body composition. Nutrition, 17: 26-30. doi: 10.1016/S0899-9007(00)00471-8 [149] Fratzl P, Weinkamer R. 2007. Nature’s hierarchical materials. Prog Mater Sci, 52: 1263-1334. doi: 10.1016/j.pmatsci.2007.06.001 [150] Freed A D, Doehring T C. 2005. Elastic model for crimped collagen fibrils. J Biomech Eng, 127: 587. doi: 10.1115/1.1934145 [151] Fu K, Zhao Z, Ren G, et al. 2019. From multiscale modeling to design of synchronization mechanisms in mesh antennas. Acta Astronaut, 159: 156-165. doi: 10.1016/j.actaastro.2019.03.056 [152] Fung Y C. 1993. Biomechanics: Mechanical Properties of Living Tissues, 2nd edn. New York: Springer-Verlag. [153] Gantoi F M, Brown M A, Shabana A A. 2010. ANCF finite element/multibody system formulation of the ligament/bone insertion site constraints. J Comput Nonlinear Dyn, 5: 031006. doi: 10.1115/1.4001373 [154] Gantoi F M, Brown M A, Shabana A A. 2012. ANCF modeling of the contact geometry and deformation in biomechanics applications//International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers, 45011: 53-65. [155] Gantoi F M, Brown M A, Shabana A A. 2013. Finite element modeling of the contact geometry and deformation in biomechanics applications. J Comput Nonlinear Dyn, 8: 041013. doi: 10.1115/1.4024541 [156] Gao Z, Guo H, Chen W. 2014. Initial tension of the human extraocular muscles in the primary eye position. J Theor Biol, 353: 78-83. doi: 10.1016/j.jtbi.2014.03.018 [157] Gardner-Morse M G, Stokes I A F. 2004. Structural behavior of human lumbar spinal motion segments. J Biomech, 37: 205-212. doi: 10.1016/j.jbiomech.2003.10.003 [158] Garner B A, Pandy M G. 2003. Estimation of musculotendon properties in the human upper limb. Ann Biomed Eng, 31: 207-220. doi: 10.1114/1.1540105 [159] Gautieri A, Pate M I, Vesentini S, et al. 2012a. Hydration and distance dependence of intermolecular shearing between collagen molecules in a model microfibril. J Biomech, 45: 2079-2083. doi: 10.1016/j.jbiomech.2012.05.047 [160] Gautieri A, Vesentini S, Redaelli A, Ballarini R. 2013. Modeling and measuring visco-elastic properties: From collagen molecules to collagen fibrils. Int J Non Linear Mech, 56: 25-33. doi: 10.1016/j.ijnonlinmec.2013.03.012 [161] Gautieri A, Vesentini S, Redaelli A, Buehler M J. 2011. Hierarchical structure and nanomechanics of collagen microfibrils from the atomistic scale up. Nano Lett, 11: 757-766. doi: 10.1021/nl103943u [162] Gautieri A, Vesentini S, Redaelli A, Buehler M J. 2012b. Viscoelastic properties of model segments of collagen molecules. Matrix Biol, 31: 141-149. doi: 10.1016/j.matbio.2011.11.005 [163] Geier A, Kebbach M, Soodmand E, et al. 2019. Neuro-musculoskeletal flexible multibody simulation yields a framework for efficient bone failure risk assessment. Sci Rep, 9: 6928. doi: 10.1038/s41598-019-43028-6 [164] Gervais B, Vadean A, Brochu M, et al. 2018. Influence of the load modelling during gait on the stress distribution in a femoral implant. Multibody Syst Dyn, 44: 93-105. doi: 10.1007/s11044-018-9621-z [165] Geyer H, Herr H. 2010. A Muscle-reflex model that encodes principles of legged mechanics produces human walking dynamics and muscle activities. IEEE Trans Neural Syst Rehabil Eng, 18: 263-273. doi: 10.1109/TNSRE.2010.2047592 [166] Gfrerer M H, Simeon B. 2021. Fiber-based modeling and simulation of skeletal muscles. Multibody Syst Dyn, 52: 1-30. doi: 10.1007/s11044-021-09781-1 [167] Ghodsi H, Darvish K. 2016. Characterization of the viscoelastic behavior of a simplified collagen micro-fibril based on molecular dynamics simulations. J Mech Behav Biomed Mater, 63: 26-34. [168] Givli S, Bhattacharya K. 2009. A coarse-grained model of the myofibril: Overall dynamics and the evolution of sarcomere non-uniformities. J Mech Phys Solids, 57: 221-243. doi: 10.1016/j.jmps.2008.10.013 [169] Gollapudi S K, Lin D C. 2009. Experimental determination of sarcomere force-length relationship in type-I human skeletal muscle fibers. J Biomech, 42: 2011-2016. doi: 10.1016/j.jbiomech.2009.06.013 [170] Gomes M W. 2005. Collisionless rigid body locomotion models and physically based homotopy methods for finding periodic motions in high degree of freedom models. [phD Thesis]. New York: Cornell University. [171] Gotti C, Sensini A, Zucchelli A, et al. 2020. Hierarchical fibrous structures for muscle‐inspired soft‐actuators: A review. Appl Mater Today, 20: 100772. doi: 10.1016/j.apmt.2020.100772 [172] Groote F De, Jonkers I, Duysens J. 2014. Task constraints and minimization of muscle effort result in a small number of muscle synergies during gait. Front Comput Neurosci, 8: 1-11. [173] Grazioso S, Di Gironimo G, Siciliano B. 2019. A geometrically exact model for soft continuum robots: The finite element deformation space formulation. Soft Robotic, 6: 790-811. doi: 10.1089/soro.2018.0047 [174] Guess TM. 2012. Forward dynamics simulation using a natural knee with menisci in the multibody framework. Multibody Syst Dyn, 28: 37-53. doi: 10.1007/s11044-011-9293-4 [175] Guess TM, Razu S, Jahandar H, Stylianou A. 2015. Predicted loading on the menisci during gait: The effect of horn laxity. J Biomech, 48: 1490-1498. doi: 10.1016/j.jbiomech.2015.01.047 [176] Guess TM, Thiagarajan G, Kia M, Mishra M. 2010. A subject specific multibody model of the knee with menisci. Med Eng Phys, 32: 505-515. doi: 10.1016/j.medengphy.2010.02.020 [177] Günther M, Schmitt S, Wank V. 2007. High-frequency oscillations as a consequence of neglected serial damping in Hill-type muscle models. Biol Cybern, 97: 63-79. doi: 10.1007/s00422-007-0160-6 [178] Günther M, Wagner H. 2016. Dynamics of quiet human stance: computer simulations of a triple inverted pendulum model. Comput Methods Biomech Biomed Engin, 19: 819-834. doi: 10.1080/10255842.2015.1067306 [179] Guo H, Gao Z, Chen W. 2016. Contractile force of human extraocular muscle: A theoretical analysis. Appl Bionics Biomech, 2016: 4091824. [180] Guo H, Gao Z, Han B, et al. 2019. In vivo experimental study on the resistance and stiffness of orbital suspension tissues with/without the extraocular muscles. Biomed Eng Online, 18: 68. doi: 10.1186/s12938-019-0688-4 [181] Guo J, Guo W, Ren G. 2021a. Embodiment of intra-abdominal pressure in a flexible multibody model of the trunk and the spinal unloading effects during static lifting tasks. Biomech Model Mechanobiol, 20: 1599-1626. doi: 10.1007/s10237-021-01465-1 [182] Guo J, Huang H, Yu Y, et al. 2020a. Modeling muscle wrapping and mass flow using a mass-variable multibody formulation. Multibody Syst Dyn, 49: 315-336. doi: 10.1007/s11044-020-09733-1 [183] Guo J, Sun Y, Cui L, et al. 2021b. Wave propagation in muscles predicted by a Hill-type model with distributed mass//XXVIII Congress of the International Society of Biomechanics (ISB) [184] Guo J, Sun Y, Hao Y, et al. 2020b. A mass-flowing muscle model with shape restrictive soft tissues: correlation with sonoelastography. Biomech Model Mechanobiol, 19: 911-926. doi: 10.1007/s10237-019-01260-z [185] Guo J, Yin Y, Hu X, Ren G. 2020c. Self-similar network model for fractional-order neuronal spiking: implications of dendritic spine functions. Nonlinear Dyn, 100: 921-935. doi: 10.1007/s11071-020-05519-4 [186] Guo J, Yin Y, Peng G. 2021c. Fractional-order viscoelastic model of musculoskeletal tissues: Correlation with fractals. Proc R Soc A Math Phys Eng Sci, 477: 20200990. [187] Guo J, Yin Y, Ren G. 2019. Abstraction and operator characterization of fractal ladder viscoelastic hyper-cell for ligaments and tendons. Appl Math Mech, 40: 1429-1448. doi: 10.1007/s10483-019-2524-8 [188] Guo Y, Sun Y, Ren Y, et al. 2019. Upper limb muscle force estimation during table tennis strokes//2019 IEEE 16th International Conference on Wearable and Implantable Body Sensor Networks (BSN), 18918339. [189] Guo Y, Zhang X, An M, et al. 2012. Determination of quadriceps forces in squat and its application in contact pressure analysis of knee joint. Acta Mech Solida Sin, 25: 53-60. doi: 10.1016/S0894-9166(12)60006-8 [190] Gupta HS, Seto J, Krauss S, et al. 2010. In situ multi-level analysis of viscoelastic deformation mechanisms in tendon collagen. J Struct Biol, 169: 183-191. doi: 10.1016/j.jsb.2009.10.002 [191] Günther M, Röhrle O, Daniel F, Haeufle B, Schmitt S. 2012. Spreading out muscle mass within a Hill-type model: A computer simulation study. Comput Math Methods Med, 2012: 1-13. [192] Haeufle D F B, Günther M, Bayer A, et al. 2014. Hill-type muscle model with serial damping and eccentric force–velocity relation. J Biomech, 47: 1531-1536. doi: 10.1016/j.jbiomech.2014.02.009 [193] Haeufle D F B, Stollenmaier K, Heinrich I, et al. 2020. Morphological computation increases from lower- to higher-level of biological motor control hierarchy. Front Robot, 7: 511265. doi: 10.3389/frobt.2020.511265 [194] Hammer M, Günther M, Haeufle D F B, Schmitt S. 2019. Tailoring anatomical muscle paths: a sheath-like solution for muscle routing in musculoskeletal computer models. Math Biosci, 311: 68-81. doi: 10.1016/j.mbs.2019.02.004 [195] Hamner S R, Seth A, Steele K M, Delp S L. 2013. A rolling constraint reproduces ground reaction forces and moments in dynamic simulations of walking, running, and crouch gait. J Biomech, 46: 1772-1776. doi: 10.1016/j.jbiomech.2013.03.030 [196] Han M, Hong J, Park F C. 2015. Musculoskeletal dynamics simulation using shape-varying muscle mass models. Multibody Syst Dyn, 33: 367-388. doi: 10.1007/s11044-014-9427-6 [197] Handsfield G G, Meyer C H, Hart J M, et al. 2014. Relationships of 35 lower limb muscles to height and body mass quantified using MRI. J Biomech, 47: 631-638. doi: 10.1016/j.jbiomech.2013.12.002 [198] Hannam A G. 2011. Current computational modelling trends in craniomandibular biomechanics and their clinical implications. J Oral Rehabil, 38: 217-234. doi: 10.1111/j.1365-2842.2010.02149.x [199] Hannam A G, Stavness I, Lloyd J E, Fels S. 2008. A dynamic model of jaw and hyoid biomechanics during chewing. J Biomech, 41: 1069-1076. doi: 10.1016/j.jbiomech.2007.12.001 [200] Hannam AG, Stavness IK, Lloyd JE, et al. 2010. A comparison of simulated jaw dynamics in models of segmental mandibular resection versus resection with alloplastic reconstruction. J Prosthet Dent, 104: 191-198. doi: 10.1016/S0022-3913(10)60120-5 [201] Hansen L, De Zee M, Rasmussen J, et al. 2006. Anatomy and biomechanics of the back muscles in the lumbar spine with reference to biomechanical modeling. Spine (Phila Pa 1976) , 31: 1888-1899. doi: 10.1097/01.brs.0000229232.66090.58 [202] He J, Ren G. 2019. A multibody dynamics approach to limit cycle walking. Robotica, 37: 1804-1822. doi: 10.1017/S0263574719000274 [203] Hegarty A K, Hulbert T V, Kurz M J, et al. 2019. Evaluation of a method to scale muscle strength for gait simulations of children with cerebral palsy. J Biomech, 83: 165-173. doi: 10.1016/j.jbiomech.2018.11.037 [204] Heidlauf T, Klotz T, Rode C, et al. 2016. A multi-scale continuum model of skeletal muscle mechanics predicting force enhancement based on actin-titin interaction. Biomech Model Mechanobiol, 15: 1423-1437. doi: 10.1007/s10237-016-0772-7 [205] Hicks J L, Uchida T K, Seth A, et al. Is my model good enough? Best practices for verification and validation of musculoskeletal models and simulations of movement. Journal of Biomechanical Engineering, 2015, 137(2): 020905 [206] Hill A V. 1938. The heat of shortening and the dynamic constants of muscle. Proc R Soc London Ser B - Biol Sci, 126: 136-195. [207] Hirashima M, Oya T. 2016. How does the brain solve muscle redundancy? Filling the gap between optimization and muscle synergy hypotheses. Neurosci Res, 104: 80-87. doi: 10.1016/j.neures.2015.12.008 [208] Hodges P W, Pengel L H M, Herbert R D, Gandevia S. 2003. Measurement of muscle contraction with ultrasound imaging. Muscle Nerve, 27: 682-692. doi: 10.1002/mus.10375 [209] Holmes P D, Danforth S M, Fu X Y, et al. 2020. Characterizing the limits of human stability during motion: perturbative experiment validates a model-based approach for the Sit-to-Stand task. Royal Soc Open Sci, 7: 191410. doi: 10.1098/rsos.191410 [210] Horsman M D K, Koopman H F J M, van der Helm F C T, et al. 2007. Morphological muscle and joint parameters for musculoskeletal modelling of the lower extremity. Clin Biomech, 22: 239-247. doi: 10.1016/j.clinbiomech.2006.10.003 [211] Hou J, Sun Y, Sun L, et al. 2016. A pilot study of individual muscle force prediction during elbow flexion and extension in the neurorehabilitation field. Sensors, 16: 2018. doi: 10.3390/s16122018 [212] Howell G W, Baillieul J. 1998. Simple controllable walking mechanisms which exhibit bifurcations//Proceedings of the 37th IEEE Conference on Decision and Control, 3: 3027-3032. [213] Huang H, Guo J, Yang J, et al. 2017. Isokinetic angle-specific moments and ratios characterizing hamstring and quadriceps strength in anterior cruciate ligament deficient knees. Sci Rep, 7: 1-11. doi: 10.1038/s41598-016-0028-x [214] Huang Y, Robinson D L, Pitocchi J, et al. 2022. Glenohumeral joint reconstruction using statistical shape modeling. Biomech Model Mechanobiol, 21: 249-259. doi: 10.1007/s10237-021-01533-6 [215] Hui G C, Amaral J, Stephens D, et al. 2005. Gas distribution in intraabdominal and pelvic abscesses on CT is associated with drainability. Am J Roentgenol, 184: 915-919. doi: 10.2214/ajr.184.3.01840915 [216] Huijing P A. 1999. Muscle as a collagen fiber reinforced composite: A review of force transmission in muscle and whole limb. J Biomech, 32: 329-345. doi: 10.1016/S0021-9290(98)00186-9 [217] Huijing P A. 2009. Epimuscular myofascial force transmission: A historical review and implications for new research. International society of biomechanics Muybridge award lecture, Taipei, 2007. J Biomech, 42: 9-21. doi: 10.1016/j.jbiomech.2008.09.027 [218] Huijing P A. 2007. Epimuscular myofascial force transmission between antagonistic and synergistic muscles can explain movement limitation in spastic paresis. J Electromyogr Kinesiol, 17: 708-724. doi: 10.1016/j.jelekin.2007.02.003 [219] Huijing P A, Yaman A, Ozturk C, Yucesoy C A. 2011. Effects of knee joint angle on global and local strains within human triceps surae muscle: MRI analysis indicating in vivo myofascial force transmission between synergistic muscles. Surg Radiol Anat, 33: 869-879. doi: 10.1007/s00276-011-0863-1 [220] Hume D R, Navacchia A, Ali A A, Shelburne K B. 2018. The interaction of muscle moment arm, knee laxity, and torque in a multi-scale musculoskeletal model of the lower limb. J Biomech, 76: 173-180. doi: 10.1016/j.jbiomech.2018.05.030 [221] Hume D R, Navacchia A, Rullkoetter P J, Shelburne K B. 2019. A lower extremity model for muscle-driven simulation of activity using explicit finite element modeling. J Biomech, 84: 153-160. doi: 10.1016/j.jbiomech.2018.12.040 [222] Hürmüzlü Y, Moskowitz G D. 1986. The role of impact in the stability of bipedal locomotion. Dynamics and Stability of Systems, 1: 217-234. doi: 10.1080/02681118608806015 [223] Huxley A F. 1957. Muscle structure and theories of contraction. Prog Biophys Biophys Chem, 7: 255-318. doi: 10.1016/S0096-4174(18)30128-8 [224] Huxley A F, Niedergerke R. 1954. Structural canges in muscle during contraction: Interference microscopy of living muscle fibres. Nature, 173: 971-973. doi: 10.1038/173971a0 [225] Hayashibe M, Venture G, Ayusawa K, et al. 2011. Muscle strength and mass distribution identification toward subject-specific musculoskeletal modeling//2011 IEEE/RSJ International Conference on Intelligent Robots and Systems: 3701-3707. [226] Ignasiak D, Dendorfer S, Ferguson SJ. 2016a. Thoracolumbar spine model with articulated ribcage for the prediction of dynamic spinal loading. J Biomech, 49: 959-966. doi: 10.1016/j.jbiomech.2015.10.010 [227] Ignasiak D, Ferguson S J, Arjmand N. 2016b. A rigid thorax assumption affects model loading predictions at the upper but not lower lumbar levels. J Biomech, 49: 3074-3078. doi: 10.1016/j.jbiomech.2016.07.006 [228] Ignasiak D, Valenzuela W, Reyes M, et al. 2018. The effect of muscle ageing and sarcopenia on spinal segmental loads. Eur Spine J, 27: 2650-2659. doi: 10.1007/s00586-018-5729-3 [229] Ignasiak D. 2020. A novel method for prediction of postoperative global sagittal alignment based on full-body musculoskeletal modeling and posture optimization. J Biomech, 102: 109324. doi: 10.1016/j.jbiomech.2019.109324 [230] Inkol K A, Brown C, McNally W, et al. 2020. Muscle torque generators in multibody dynamic simulations of optimal sports performance. Multibody Syst Dyn, 50: 435-452. doi: 10.1007/s11044-020-09747-9 [231] Inman V T. 1947. Functional aspects of the abductor muscles of the hip. J Bone Joint Surg Am, 29: 607-619. [232] Ishida S, Shibuya Y, Kobayashi M, Komori T. 2015. Assessing stomatognathic performance after mandibulectomy according to the method of mandibular reconstruction. Int J Oral Maxillofac Surg, 44: 948-955. doi: 10.1016/j.ijom.2015.03.011 [233] Jackson J N, Hass C J, Fregly B J. Development of a subject-specific foot-ground contact model for walking. J Biomech Eng, 2016, 138: 091002. [234] Jalalian A, Tay F E H, Arastehfar S, Liu G. 2017. A patient-specific multibody kinematic model for representation of the scoliotic spine movement in frontal plane of the human body. Multibody Syst Dyn, 39: 197-220. doi: 10.1007/s11044-016-9556-1 [235] Jansen C, McPhee J. 2020. Predictive dynamic simulation of Olympic track cycling standing start using direct collocation optimal control. Multibody Syst Dyn, 49: 53-70. doi: 10.1007/s11044-020-09723-3 [236] Ji B, Gao H. 2004. Mechanical properties of nanostructure of biological materials. J Mech Phys Solids, 52: 1963-1990. doi: 10.1016/j.jmps.2004.03.006 [237] Jomo J N, de Prenter F, Elhaddad M, et al. 2019. Robust and parallel scalable iterative solutions for large-scale finite cell analyses. Finite Elem Anal Des, 163: 14-30. doi: 10.1016/j.finel.2019.01.009 [238] Joyce G C, Rack P M H, Mestbury D R. 1969. The Mechanical properties of cat soleus muscle during controlled lengthening and shortening movements. J Physiol, 204: 461-474. doi: 10.1113/jphysiol.1969.sp008924 [239] Kamal Z, Rouhi G, Arjmand N, Adeeb S. 2019. A stability-based model of a growing spine with adolescent idiopathic scoliosis: A combination of musculoskeletal and finite element approaches. Med Eng Phys, 64: 46-55. doi: 10.1016/j.medengphy.2018.12.015 [240] Kaptein B L, Van Der Helm F C T. 2004. Estimating muscle attachment contours by transforming geometrical bone models. J Biomech, 37: 263-273. doi: 10.1016/j.jbiomech.2003.08.005 [241] Karajan N, Röhrle O, Ehlers W, Schmitt S. 2013. Linking continuous and discrete intervertebral disc models through homogenisation. Biomech Model Mechanobiol, 12: 453-466. doi: 10.1007/s10237-012-0416-5 [242] Karatsidis A, Jung M, Schepers H M, et al. 2019. Musculoskeletal model-based inverse dynamic analysis under ambulatory conditions using inertial motion capture. Med Eng Phys, 65: 68-77. doi: 10.1016/j.medengphy.2018.12.021 [243] Kastelic J, Galeski A, Baer E. 1978. Multicomposite structure of tendon. Connect Tissue Res, 6: 11-23. doi: 10.3109/03008207809152283 [244] Khasian M, Meccia B A, LaCour M T, Komistek R D. 2020. A validated forward solution dynamics mathematical model of the knee joint: Can it be an effective alternative for implant evaluation. J Arthroplasty, 35: 3289-3299. doi: 10.1016/j.arth.2020.06.017 [245] Khurelbaatar T, Kim K, Hyuk Kim Y. 2015. A cervico-thoraco-lumbar multibody dynamic model for the estimation of joint loads and muscle forces. J Biomech Eng, 137: 111001. doi: 10.1115/1.4031351 [246] Kia M, Stylianou A P, Guess T M. 2014. Evaluation of a musculoskeletal model with prosthetic knee through six experimental gait trials. Med Eng Phys, 36: 335-344. doi: 10.1016/j.medengphy.2013.12.007 [247] Kian A, Pizzolato C, Halaki M, et al. 2019. Static optimization underestimates antagonist muscle activity at the glenohumeral joint: A musculoskeletal modeling study. J Biomech, 97: 109348. doi: 10.1016/j.jbiomech.2019.109348 [248] Kidziński Ł, Mohanty S P, Ong C F, et al. 2018. Learning to run challenge: Synthesizing physiologically accurate motion using deep reinforcement learning//The NIPS'17 Competition: Building Intelligent Systems. Springer, Cham: 101-120. [249] Killen B A, da Luz S B, Lloyd D G, et al. 2021. Automated creation and tuning of personalised muscle paths for OpenSim musculoskeletal models of the knee joint. Biomech Model Mechanobiol, 20: 521-533. doi: 10.1007/s10237-020-01398-1 [250] Kłodowski A, Mononen M E, Kulmala J P, et al. 2016. Merge of motion analysis, multibody dynamics and finite element method for the subject-specific analysis of cartilage loading patterns during gait: differences between rotation and moment-driven models of human knee joint. Multibody Syst Dyn, 37: 271-290. doi: 10.1007/s11044-015-9470-y [251] Kłodowski A, Rantalainen T, Heinonen A, et al. 2011a. The use of the flexible multibody approach for lower body skeletal loading analysis. Procedia IUTAM, 2: 93-100. doi: 10.1016/j.piutam.2011.04.010 [252] Kłodowski A, Rantalainen T, Mikkola A, et al. 2011b. Flexible multibody approach in forward dynamic simulation of locomotive strains in human skeleton with flexible lower body bones. Multibody Syst Dyn, 25: 395-409. doi: 10.1007/s11044-010-9240-9 [253] Kłodowski A, Valkeapää A, Mikkola A. 2012. Pilot study on proximal femur strains during locomotion and fall-down scenario. Multibody Syst Dyn, 28: 239-256. doi: 10.1007/s11044-012-9312-0 [254] Koolstra J H, van Eijden T M G J. 1997. The jaw open-close movements predicted by biomechanical modelling. J Biomech, 30: 943-950. doi: 10.1016/S0021-9290(97)00058-4 [255] Koolstra J H, Van Eijden T M G J. 2004. Functional significance of the coupling between head and jaw movements. J Biomech, 37: 1387-1392. doi: 10.1016/j.jbiomech.2003.12.021 [256] Kutch J J, Valero-Cuevas F J. 2012. Challenges and new approaches to proving the existence of muscle synergies of neural origin. PLoS Comput Biol, 8: e1002434. doi: 10.1371/journal.pcbi.1002434 [257] Lamecker H, Zachow S. 2016. Statistical shape modeling of musculoskeletal structures and its applications//Computational Radiology for Orthopaedic Interventions. Cham, Springer: 1-23. [258] Leboeuf F, Bessonnet G, Seguin P, Lacouture P. 2006. Energetic versus sthenic optimality criteria for gymnastic movement synthesis. Multibody Syst Dyn, 16: 213-236. doi: 10.1007/s11044-006-9024-4 [259] Lemoyne R, Petak J, Tester J, Nishikawa K. 2014. Simulation of a computational winding filament model with an exponential spring to represent titin//36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society: 836-839. [260] Levitt M D. 1971. Volume and composition of human intestinal gas determined by means of an intestinal washout technic. N Engl J Med, 284: 1394-1398. doi: 10.1056/NEJM197106242842502 [261] Li, G Y, Cao Y. 2017. Mechanics of ultrasound elastography. Proc R Soc A Math Phys Eng Sci, 473: 20160841. [262] Li K, O’Farrell M, Martin D, et al. 2009. Mapping ligament insertion sites onto bone surfaces in knee by co-registration of CT and digitization data. J Biomech, 42: 2624-2626. doi: 10.1016/j.jbiomech.2009.06.042 [263] Li P, Liu C, Tian Q, et al. 2016. Dynamics of a deployable mesh reflector of satellite antenna: parallel computation and deployment simulation. J Comput Nonlinear Dyn, 11: 061005. doi: 10.1115/1.4033657 [264] Li T, Chen Z, Gao Y, et al. 2020. Fluid–solid coupling numerical simulation of trabecular bone under cyclic loading in different directions. J Biomech, 109: 109912. doi: 10.1016/j.jbiomech.2020.109912 [265] Liu T, Khalaf K, Adeeb S, El-Rich M. 2019. Numerical investigation of intra-abdominal pressure effects on spinal loads and load-sharing in forward flexion. Front Bioeng Biotechnol, 7: 1-12. doi: 10.3389/fbioe.2019.00001 [266] Liu X, Huang H, Ren S, et al. 2020a. Use of the normalcy index for the assessment of abnormal gait in the anterior cruciate ligament deficiency combined with meniscus injury. Comput Methods Biomech Biomed Engin 23: 1102–1108. [267] Liu X, Huang H, Yin W, et al. 2020b. Anterior cruciate ligament deficiency combined with lateral and/or medial meniscal injury results in abnormal kinematics and kinetics during level walking. Proc Inst Mech Eng Part H J Eng Med 234: 91–99. [268] Lin Y C, Haftka R T, Queipo N V, et al. 2010. Surrogate articular contact models for computationally efficient multibody dynamic simulations. Med Eng Phys, 32: 584-594. doi: 10.1016/j.medengphy.2010.02.008 [269] Lloyd D G, Besier T F. 2003. An EMG-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo. J Biomech, 36: 765-776. doi: 10.1016/S0021-9290(03)00010-1 [270] Lloyd J E, Roewer-Despres F, Stavness I. 2021. Muscle path wrapping on arbitrary surfaces. IEEE Trans Biomed Eng, 68: 628-638. doi: 10.1109/TBME.2020.3009922 [271] Lloyd J E, Stavness I, Fels S. 2012. ArtiSynth: A fast interactive biomechanical modeling toolkit combining multibody and finite element simulation//Soft tissue biomechanical modeling for computer assisted surgery. Berlin, Heidelberg: Springer-Verlag New York, 355-394. [272] Lopes D S, Neptune R R, Ambrósio J A, Silva M T. 2016. A superellipsoid-plane model for simulating foot-ground contact during human gait. Comput Methods Biomech Biomed Engin, 19: 954-963. doi: 10.1080/10255842.2015.1081181 [273] Lopata R G P, van Dijk J P, Pillen S, et al. 2010. Dynamic imaging of skeletal muscle contraction in three orthogonal directions. J Appl Physiol, 109: 906-915. doi: 10.1152/japplphysiol.00092.2010 [274] Lu J, Zhou X. 2011. Cylindrical element: Isogeometric model of continuum rod. Comput Methods Appl Mech Eng, 200: 233-241. doi: 10.1016/j.cma.2010.08.007 [275] Lu Y, Mei Q, Peng H T, et al. 2020. A comparative study on loadings of the lower extremity during deep squat in asian and caucasian individuals via OpenSim Musculoskeletal modelling. BioMed Res Int, 2020: 7531719. [276] Lund M, Andersen M, de Zee M, et al. 2015. Scaling of musculoskeletal models from static and dynamic trials. Int Biomech, 2: 1-11. doi: 10.1080/23335432.2014.993706 [277] Luo K, Hu H, Liu C, et al. 2017. Model order reduction for dynamic simulation of a flexible multibody system via absolute nodal coordinate formulation. Comput Methods Appl Mech Eng, 324: 573-594. doi: 10.1016/j.cma.2017.06.029 [278] Luthi M, Gerig T, Jud C, Vetter T. 2018. Gaussian process morphable models. IEEE Trans Pattern Anal Mach Intell, 40: 1860-1873. doi: 10.1109/TPAMI.2017.2739743 [279] Ma D, Donlon E, Dong S, et al. 2019. Dense Tactile Force Estimation using GelSlim and inverse FEM, " 2019 International Conference on Robotics and Automation (ICRA), 5418-5424. [280] Ma X, Xu J, Fang H, et al. 2022. Adaptive neural control for gait coordination of a lower limb prosthesis. Int J Mech Sci, 215: 106942. doi: 10.1016/j.ijmecsci.2021.106942 [281] Ma Y, Yu Y, Jiang S, et al. 2019. Effect of different musculoskeletal model scaling methods on muscle force prediction for patients with cerebral palsy and equinus gait. ICIIBMS 2019 - 4th Int Conf Intell Informatics Biomed Sci, 6-12. [282] Maas H, Baan G C, Huijing P A. 2001. Intermuscular interaction via myofascial force transmission: Effects of tibialis anterior and extensor hallucis longus length on force transmission from rat extensor digitorum longus muscle. J Biomech, 34: 927-940. doi: 10.1016/S0021-9290(01)00055-0 [283] Maas H, Huijing P A. 2009. Synergistic and antagonistic interactions in the rat forelimb: acute effects of coactivation. J Appl Physiol, 107: 1453-1462. doi: 10.1152/japplphysiol.00328.2009 [284] Maganaris C N, Paul J P. 2002. Tensile properties of the in vivo human gastrocnemius tendon. J Biomech, 35: 1639-1646. doi: 10.1016/S0021-9290(02)00240-3 [285] Mainen Z F, Sejnowski T J. 1996. Influence of dendritic structure on firing pattern in model neocortical neurons. Nature, 382: 363-366. doi: 10.1038/382363a0 [286] Maïsetti O, Hug F, Bouillard K, Nordez A. 2012. Characterization of passive elastic properties of the human medial gastrocnemius muscle belly using supersonic shear imaging. J Biomech, 45: 978-984. doi: 10.1016/j.jbiomech.2012.01.009 [287] Magnusson S P, Aagaard P, Rosager S, et al. 2001. Load-displacement properties of the human triceps surae aponeurosis in vivo. J Physiol, 531: 277-288. doi: 10.1111/j.1469-7793.2001.0277j.x [288] Manal K, Roberts D P, Buchanan T S. 2008. Can pennation angles be predicted from EMGs for the primary ankle plantar and dorsiflexors during isometric contractions. J Biomech, 41: 2492-2497. doi: 10.1016/j.jbiomech.2008.05.005 [289] Marras W S, Davis K G. 2001. A non-MVC EMG normalization technique for the trunk musculature: Part 1. Method development. J Electromyogr Kinesiol, 11: 1-9. doi: 10.1016/S1050-6411(00)00039-0 [290] Mashima H. 1984. Force-velocity relation and contractility in striated muscles. Jpn J Physiol, 34: 1-17. doi: 10.2170/jjphysiol.34.1 [291] McGeer T. 1990. Passive dynamic walking. Int J Robotics Res, 9: 62-82. doi: 10.1177/027836499000900206 [292] Meng X, Bruno A G, Cheng B, et al. 2015. Incorporating six degree-of-freedom intervertebral joint stiffness in a lumbar spine musculoskeletal model—Method and performance in flexed postures. J Biomech Eng, 137: 101008. doi: 10.1115/1.4031417 [293] Meyer G A, Kiss B, Ward S R, et al. 2010. Theoretical predictions of the effects of force transmission by desmin on intersarcomere dynamics. Biophys J, 98: 258-266. doi: 10.1016/j.bpj.2009.10.014 [294] Mileusnic M P, Brown I E, Lan N, Loeb G E. 2006. Mathematical models of proprioceptors. I. Control and transduction in the muscle spindle. J Neurophysiol, 96: 1772-1788. doi: 10.1152/jn.00868.2005 [295] Millard M, Delp S. 2012. A computationally efficient muscle model//ASME 2012 Summer Bioengineering Conference. American Society of Mechanical Engineers, Fajardo, Puerto Rico, 1055-1056. [296] Millard M, Mombaur K. 2019. A quick turn of foot: Rigid foot-ground contact models for human motion prediction. Front Neurorobot, 13: 62. doi: 10.3389/fnbot.2019.00062 [297] Millard M, Uchida T, Seth A, Delp S L. 2013. Flexing computational muscle: Modeling and simulation of musculotendon dynamics. J Biomech Eng, 135: 021005. doi: 10.1115/1.4023390 [298] Mo F, Li J, Dan M, et al. 2019. Implementation of controlling strategy in a biomechanical lower limb model with active muscles for coupling multibody dynamics and finite element analysis. J Biomech, 91: 51-60. [299] Modenese L, Kohout J. 2020. Automated generation of three-dimensional complex muscle geometries for use in personalised musculoskeletal models. Ann Biomed Eng, 48: 1793-1804. doi: 10.1007/s10439-020-02490-4 [300] Modenese L, Phillips A T M. 2012. Prediction of hip contact forces and muscle activations during walking at different speeds. Multibody Syst Dyn, 28: 157-168. doi: 10.1007/s11044-011-9274-7 [301] Modenese L, Phillips A T M, Bull A M J. 2011. An open source lower limb model: Hip joint validation. J Biomech, 44: 2185-2193. doi: 10.1016/j.jbiomech.2011.06.019 [302] Moissenet F, Chèze L, Dumas R. 2012. Potential of the pseudo-inverse method as a constrained static optimization for musculo-tendon forces prediction. J Biomech Eng, 134: 64503-64507. doi: 10.1115/1.4006900 [303] Mohamed A N A, Brown M A, Shabana A A. 2010. Study of the ligament tension and cross-section deformation using nonlinear finite element/multibody system algorithms. Multibody Syst Dyn, 23: 227-248. doi: 10.1007/s11044-009-9181-3 [304] Molnar C A, Zelei A, Insperger T. 2021. Rolling balance board of adjustable geometry as a tool to assess balancing skill and to estimate reaction time delay. J R Soc Interface, 18: 20200956. doi: 10.1098/rsif.2020.0956 [305] Monteiro N M B, Da Silva M P T, Folgado JOMG, Melancia JPL. 2011. Structural analysis of the intervertebral discs adjacent to an interbody fusion using multibody dynamics and finite element cosimulation. Multibody Syst Dyn, 25: 245-270. doi: 10.1007/s11044-010-9226-7 [306] Mordhorst M, Strecker T, Wirtz D, et al. 2017. POD-DEIM reduction of computational EMG models. J Comput Sci, 19: 86-96. doi: 10.1016/j.jocs.2017.01.009 [307] Mörl F, Günther M, Riede J M, et al. 2020. Loads distributed in vivo among vertebrae, muscles, spinal ligaments, and intervertebral discs in a passively flexed lumbar spine. Biomech Model Mechanobiol, 19: 2015-2047. doi: 10.1007/s10237-020-01322-7 [308] Moya-Esteban A, Brouwer N P, Tabasi A, et al. 2020. Muscle-level analysis of trunk mechanics via musculoskeletal modeling and high-density electromyograms//Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, 1109-1114. [309] Müller J H, Razu S, Erdemir A, Guess T M. 2020. Prediction of patellofemoral joint kinematics and contact through co-simulation of rigid body dynamics and nonlinear finite element analysis. Comput Methods Biomech Biomed Engin, 23: 718-733. doi: 10.1080/10255842.2020.1761960 [310] Murai A, Kurosaki K, Yamane K, Nakamura Y. 2010. Musculoskeletal-see-through mirror: Computational modeling and algorithm for whole-body muscle activity visualization in real time. Prog Biophys Mol Biol, 103: 310-317. doi: 10.1016/j.pbiomolbio.2010.09.006 [311] Narioka K, Tsugawa S, Hosoda K. 2009. 3D limit cycle walking of musculoskeletal humanoid robot with flat feet//2009 IEEE/RSJ International Conference on Intelligent Robots and Systems: 4676-4681. [312] Navacchia A, Hume D R, Rullkoetter P J, Shelburne K B. 2019. A computationally efficient strategy to estimate muscle forces in a finite element musculoskeletal model of the lower limb. J Biomech, 84: 94-102. doi: 10.1016/j.jbiomech.2018.12.020 [313] Navacchia A, Rullkoetter P J, Schütz P, et al. 2016. Subject-specific modeling of muscle force and knee contact in total knee arthroplasty. J Orthop Res, 34: 1576-1587. doi: 10.1002/jor.23171 [314] Neumann D A. 2016. Kinesiology of the musculoskeletal system-e-book: Foundations for rehabilitation. Elsevier Health Sciences. [315] Nie X, Feng J, Zhang J, Yan S. 2019. Single-stage multi-person pose machines//Proceedings of the IEEE/CVF International Conference on Computer Vision, 6951-6960. [316] Nishijima Y, Kato T, Yoshizawa M, et al. 2010. Application of the segment weight dynamic movement method to the normalization of gait EMG amplitude. J Electromyogr Kinesiol, 20: 550-557. doi: 10.1016/j.jelekin.2009.07.006 [317] Nishikawa K C, Monroy J A, Uyeno T E, et al. 2012. Is titin a “winding filament”? A new twist on muscle contraction. Proc R Soc B Biol Sci, 279: 981-990. doi: 10.1098/rspb.2011.1304 [318] Pai D K. 2010. Muscle mass in musculoskeletal models. J Biomech, 43: 2093-2098. doi: 10.1016/j.jbiomech.2010.04.004 [319] Pàmies-Vilà R, Font-Llagunes J M, Lugrís U, Cuadrado J. 2014. Parameter identification method for a three-dimensional foot-ground contact model. Mech Mach Theory, 75: 107-116. doi: 10.1016/j.mechmachtheory.2014.01.010 [320] Pan B, Sun Y, Xie B, et al. 2018. Alterations of muscle synergies during voluntary arm reaching movement in subacute stroke survivors at different levels of impairment. Front Comput Neurosci, 12: 69. doi: 10.3389/fncom.2018.00069 [321] Pandy M G, Zajac F E, Sim E, Levine W S. 1990. An optimal control model for maximum-height human jumping. J Biomech, 23: 1185-1198. doi: 10.1016/0021-9290(90)90376-E [322] Pauli N, Olsson C, Pettersson N, et al. 2016. Risk structures for radiation-induced trismus in head and neck cancer. Acta Oncol (Madr) , 55: 788-792. doi: 10.3109/0284186X.2016.1143564 [323] Pellikaan P, van der Krogt M M, Carbone V, et al. 2014. Evaluation of a morphing based method to estimate muscle attachment sites of the lower extremity. J Biomech, 47: 1144-1150. doi: 10.1016/j.jbiomech.2013.12.010 [324] Peng Y, Zhang Z, Gao Y, et al. 2018. Concurrent prediction of ground reaction forces and moments and tibiofemoral contact forces during walking using musculoskeletal modelling. Med Eng Phys, 52: 31-40. doi: 10.1016/j.medengphy.2017.11.008 [325] Pettersson R, Nordmark A, Eriksson A. 2013. Optimisation of multiple phase human movements. Multibody Syst Dyn, 30: 461-484. doi: 10.1007/s11044-013-9349-8 [326] Pham H, Ariga Y, Tominaga K, et al. 2014. Extraction and implementation of muscle synergies in neuro-mechanical control of upper limb movement. Adv Robot, 28: 745-757. [327] Pizzolato C, Lloyd D G, Sartori M, et al. 2015. CEINMS: A toolbox to investigate the influence of different neural control solutions on the prediction of muscle excitation and joint moments during dynamic motor tasks. J Biomech, 48: 3929-3936. doi: 10.1016/j.jbiomech.2015.09.021 [328] Purslow P P. 2010. Muscle fascia and force transmission. J Bodyw Mov Ther, 14: 411-417. doi: 10.1016/j.jbmt.2010.01.005 [329] Putzer M, Ehrlich I, Rasmussen J, et al. 2016. Sensitivity of lumbar spine loading to anatomical parameters. J Biomech, 49: 953-958. doi: 10.1016/j.jbiomech.2015.11.003 [330] Puxkandl R, Zizak I, Paris O, et al. 2002. Viscoelastic properties of collagen: Synchrotron radiation investigations and structural model. Philos Trans R Soc B Biol Sci, 357: 191-197. doi: 10.1098/rstb.2001.1033 [331] Quental C, Folgado J, Ambrósio J. 2016. A window moving inverse dynamics optimization for biomechanics of motion. Multibody Syst Dyn, 38: 157-171. doi: 10.1007/s11044-016-9529-4 [332] Quental C, Folgado J, Ambrósio J, Monteiro J. 2015. Critical analysis of musculoskeletal modelling complexity in multibody biomechanical models of the upper limb. Comput Methods Biomech Biomed Engin, 18: 749-759. doi: 10.1080/10255842.2013.845879 [333] Raabe M E, Chaudhari A M W. 2016. An investigation of jogging biomechanics using the full-body lumbar spine model: Model development and validation. J Biomech, 49: 1238-1243. doi: 10.1016/j.jbiomech.2016.02.046 [334] Raasch C C, Zajac F E, Ma B, Levine W S. 1997. Muscle coordination of maximum-speed pedaling. J Biomech, 30: 595-602. doi: 10.1016/S0021-9290(96)00188-1 [335] Rahmati M A, Rostami M, Beigzadeh B. 2017. A low-cost optimization framework to solve muscle redundancy problem. Nonlinear Dyn, 90: 2277-2291. doi: 10.1007/s11071-017-3802-9 [336] Randhawa A, Wakeling J M. 2015. Multidimensional models for predicting muscle structure and fascicle pennation. J Theor Biol, 382: 57-63. doi: 10.1016/j.jtbi.2015.06.001 [337] Rasmussen J, Damsgaard M, Voigt M. 2001. Muscle recruitment by the min/max criterion—A comparative numerical study. J Biomech, 34: 409-415. doi: 10.1016/S0021-9290(00)00191-3 [338] Rasmussen J, de Zee M, Damsgaard M, et al. 2005. A general method for scaling musculo-skeletal models//2005 International Symposium on Computer Simulation in Biomechanics. [339] Razavian R S, Ghannadi B, McPhee J. 2019. A synergy-based motor control framework for the fast feedback control of musculoskeletal systems. J Biomech Eng, 141: 1-12. [340] Razavian R S, Ghannadi B, Mehrabi N, et al. 2018. Feedback control of functional electrical stimulation for 2-D arm reaching movements. IEEE Trans Neural Syst Rehabil Eng, 26: 2033-2043. doi: 10.1109/TNSRE.2018.2853573 [341] Razavian R S, Mehrabi N, McPhee J. 2015a. A model-based approach to predict muscle synergies using optimization: Application to feedback control. Front Comput Neurosci, 9: 121. [342] Razavian R S, Mehrabi N, McPhee J. 2015b. A neuronal model of central pattern generator to account for natural motion variation. J Comput Nonlinear Dyn, 11: 021007. [343] Razu S S, Guess T M. 2018. Electromyography-driven forward dynamics simulation to estimate in vivo joint contact forces during normal, smooth, and bouncy gaits. ASME J Biomech Eng, 140: 071012. doi: 10.1115/1.4038507 [344] Reese S P, Maas S A, Weiss J A. 2010. Micromechanical models of helical superstructures in ligament and tendon fibers predict large Poisson’s ratios. J Biomech, 43: 1394-1400. doi: 10.1016/j.jbiomech.2010.01.004 [345] Ren L, Jones R K, Howard D. 2008. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech, 41: 2750-2759. doi: 10.1016/j.jbiomech.2008.06.001 [346] Ren S, Yu Y, Shi H, et al. 2018. Three dimensional knee kinematics and kinetics in ACL-deficient patients with and without medial meniscus posterior horn tear during level walking. Gait Posture, 66: 26-31. doi: 10.1016/j.gaitpost.2018.08.007 [347] Renda F, Boyer F, Dias J, et al. 2018. Discrete cosserat approach for multisection soft manipulator dynamics. IEEE Trans Robot, 34: 1518-1533. doi: 10.1109/TRO.2018.2868815 [348] Renda F, Giorelli M, Calisti M, et al. 2014. Dynamic model of a multibending soft robot arm driven by cables. IEEE Trans Robot, 30: 1109-1122. doi: 10.1109/TRO.2014.2325992 [349] Rockenfeller R, Günther M. 2017. How to model a muscle’s active force-length relation: A comparative study. Comput Methods Appl Mech Eng, 313: 321-336. doi: 10.1016/j.cma.2016.10.003 [350] Rode C, Siebert T, Blickhan R. 2009. Titin-induced force enhancement and force depression: A “sticky-spring” mechanism in muscle contractions. J Theor Biol, 259: 350-360. doi: 10.1016/j.jtbi.2009.03.015 [351] Röhrle O, Sprenger M, Schmitt S. 2017. A two-muscle, continuum-mechanical forward simulation of the upper limb. Biomech Model Mechanobiol, 16: 743-762. doi: 10.1007/s10237-016-0850-x [352] Rupp T K, Ehlers W, Karajan N, et al. 2015. A forward dynamics simulation of human lumbar spine flexion predicting the load sharing of intervertebral discs, ligaments, and muscles. Biomech Model Mechanobiol, 14: 1081-1105. doi: 10.1007/s10237-015-0656-2 [353] Sagl B, Schmid-Schwap M, Piehslinger E, et al. 2019. A dynamic jaw model with a finite-element temporomandibular joint. Front Physiol, 10: 1-12. doi: 10.3389/fphys.2019.00001 [354] Santamaria F, Wils S, De Schutter E, Augustine G J. 2006. Anomalous diffusion in purkinje cell dendrites caused by spines. Neuron, 52: 635-648. doi: 10.1016/j.neuron.2006.10.025 [355] Sarkalkan N, Weinans H, Zadpoor A A. 2014. Statistical shape and appearance models of bones. Bone, 60: 129-140. doi: 10.1016/j.bone.2013.12.006 [356] Sartori M, Farina D, Lloyd DG. 2014. Hybrid neuromusculoskeletal modeling to best track joint moments using a balance between muscle excitations derived from electromyograms and optimization. J Biomech, 47: 3613-3621. doi: 10.1016/j.jbiomech.2014.10.009 [357] Sartori M, Reggiani M, Farina D, Lloyd D G. 2012. EMG-driven forward-dynamic estimation of muscle force and joint moment about multiple degrees of freedom in the human lower extremity. PLoS One, 7: e52618. doi: 10.1371/journal.pone.0052618 [358] Schiessel H, Blumen A. 1993. Hierarchical analogues to fractional relaxation equations. J Phys A Math Gen, 26: 5057-5069. doi: 10.1088/0305-4470/26/19/034 [359] Scholz A, Sherman M, Stavness I, et al. 2016. A fast multi-obstacle muscle wrapping method using natural geodesic variations. Multibody Syst Dyn, 36: 195-219. doi: 10.1007/s11044-015-9451-1 [360] Schweitzer L, Geisler C, Pourhassan M, et al. 2015. What is the best reference site for a single MRI slice to assess whole body skeletal muscle and adipose tissue volumes in healthy adults. Am J Clin Nutr, 102: 58-65. doi: 10.3945/ajcn.115.111203 [361] Serpas F, Yanagawa T, Pandy M. 2002. Forward-dynamics simulation of anterior cruciate ligament forces developed during isokinetic dynamometry. Comput Methods Biomech Biomed Engin, 5: 33-43. doi: 10.1080/1025584021000001614 [362] Seth A, Hicks J L, Uchida T K, et al. 2018. OpenSim: Simulating musculoskeletal dynamics and neuromuscular control to study human and animal movement. PLOS Comput Biol, 14: e1006223. doi: 10.1371/journal.pcbi.1006223 [363] Seynnes O R, Cronin N J. 2020. Simple muscle architecture analysis (SMA): An ImageJ macro tool to automate measurements in B-mode ultrasound scans. PLoS One, 15: e0229034. doi: 10.1371/journal.pone.0229034 [364] Shabana A A. 1997. Flexible multibody dynamics: review of past and recent developments. Multibody Syst Dyn, 1: 189-222. doi: 10.1023/A:1009773505418 [365] Shabana A A, Gantoi F M, Brown M A. 2011. Integration of finite element and multibody system algorithms for the analysis of human body motion. Procedia IUTAM, 2: 233-240. doi: 10.1016/j.piutam.2011.04.022 [366] Sharif Shourijeh M, McPhee J. 2014. Optimal control and forward dynamics of human periodic motions using fourier series for muscle excitation patterns. J Comput Nonlinear Dyn, 9: 021005. doi: 10.1115/1.4024911 [367] Shayestehpour H, Rasmussen J, Galibarov P, Wong C. 2021. An articulated spine and ribcage kinematic model for simulation of scoliosis deformities. Multibody Syst Dyn, 53: 115-134. doi: 10.1007/s11044-021-09787-9 [368] She X, Wei F, Damon B J, et al. 2018. Three-dimensional temporomandibular joint muscle attachment morphometry and its impacts on musculoskeletal modeling. J Biomech, 79: 119-128. doi: 10.1016/j.jbiomech.2018.08.010 [369] Shearer T. 2015. A new strain energy function for modelling ligaments and tendons whose fascicles have a helical arrangement of fibrils. J Biomech, 48: 3017-3025. doi: 10.1016/j.jbiomech.2015.07.032 [370] Shearer T, Thorpe C T, Screen H R C. 2017. The relative compliance of energy-storing tendons may be due to the helical fibril arrangement of their fascicles. J R Soc Interface, 14: 20170261. doi: 10.1098/rsif.2017.0261 [371] Shi H, Huang H, Ren S, et al. 2019. The relationship between quadriceps strength asymmetry and knee biomechanics asymmetry during walking in individuals with anterior cruciate ligament reconstruction. Gait Posture, 73: 74-79. [372] Shia V, Moore T Y, Holmes P, et al. 2018. Stability basin estimates fall risk from observed kinematics, demonstrated on the Sit-to-Stand task. J Biomech, 72: 37-45. doi: 10.1016/j.jbiomech.2018.02.022 [373] Shourijeh M S, McPhee J. 2015. Foot-ground contact modeling within human gait simulations: from Kelvin-Voigt to hyper-volumetric models. Multibody Syst Dyn, 35: 393-407. doi: 10.1007/s11044-015-9467-6 [374] Shourijeh M S, Mehrabi N, McPhee J. 2017. Forward static optimization in dynamic simulation of human musculoskeletal systems: A proof-of-concept study. J Comput Nonlinear Dyn, 12: 051005. doi: 10.1115/1.4036195 [375] Shourijeh M S, Smale K B, Potvin B M, Benoit D L. 2016. A forward-muscular inverse-skeletal dynamics framework for human musculoskeletal simulations. J Biomech, 49: 1718-1723. doi: 10.1016/j.jbiomech.2016.04.007 [376] Shumway-Cook A, Woollacott M H. 2007. Motor control: translating research into clinical practice. Lippincott Williams & Wilkins. [377] Siebert T, Rode C, Till O, et al. 2016. Force reduction induced by unidirectional transversal muscle loading is independent of local pressure. J Biomech, 49: 1156-1161. doi: 10.1016/j.jbiomech.2016.02.053 [378] Siebert T, Stutzig N, Rode C. 2017. A hill-type muscle model expansion accounting for effects of varying transverse muscle load. J Biomech, 66: 57-62. [379] Siebert T, Till O, Blickhan R. 2014. Work partitioning of transversally loaded muscle: Experimentation and simulation. Comput Methods Biomech Biomed Engin, 17: 217-229. doi: 10.1080/10255842.2012.675056 [380] Silva M P T, Ambrósio J A C. 2003. Solution of redundant muscle forces in human locomotion with multibody dynamics and optimization tools. Mech Based Des Struct Mach, 31: 381-411. doi: 10.1081/SME-120022856 [381] Skals S, Jung M K, Damsgaard M, Andersen M S. 2017a. Prediction of ground reaction forces and moments during sports-related movements. Multibody Syst Dyn, 39: 175-195. doi: 10.1007/s11044-016-9537-4 [382] Skals S, Rasmussen K P, Bendtsen K M, et al. 2017b. A musculoskeletal model driven by dual Microsoft Kinect Sensor data. Multibody Syst Dyn, 41: 297-316. doi: 10.1007/s11044-017-9573-8 [383] Sonneville V, Cardona A, Brüls O. 2014. Geometric interpretation of a non-linear beam finite element on the Lie group SE (3). Arch Mech Eng, 61: 305-329. doi: 10.2478/meceng-2014-0018 [384] Sreenivasa M, Ayusawa K, Nakamura Y. 2016. Modeling and identification of a realistic spiking neural network and musculoskeletal model of the human arm, and an application to the stretch reflex. IEEE Trans Neural Syst Rehabil Eng, 24: 591-602. doi: 10.1109/TNSRE.2015.2478858 [385] Stavness I, Lloyd J, Payan Y, Fels S. 2011. Towards speech articulation simulation with a dynamic coupled face-jaw-tongue model//ISSP’2011, 1-4 [386] Stavness I, Lloyd J E, Fels S. 2012. Automatic prediction of tongue muscle activations using a finite element model. J Biomech, 45: 2841-2848. doi: 10.1016/j.jbiomech.2012.08.031 [387] Steele K M, Tresch M C, Perreault E J. 2015. Consequences of biomechanically constrained tasks in the design and interpretation of synergy analyses. J Neurophysiol, 113: 2102-2113. doi: 10.1152/jn.00769.2013 [388] Stepan G. 2009. Delay effects in the human sensory system during balancing. Philos Trans Royal Soc A, 367: 1195-1212. doi: 10.1098/rsta.2008.0278 [389] Stoecker U, Telley I A, Stüssi E, et al. 2009. A multisegmental cross-bridge kinetics model of the myofibril. J Theor Biol, 259: 714-726. doi: 10.1016/j.jtbi.2009.03.032 [390] Stylianoul A P, Guess T M, Kia M. 2013. Multibody muscle driven model of an instrumented prosthetic knee during squat and toe rise motions. J Biomech Eng, 135: 041008. doi: 10.1115/1.4023982 [391] Suderman B L, Krishnamoorthy B, Vasavada AN. 2012. Neck muscle paths and moment arms are significantly affected by wrapping surface parameters. Comput Methods Biomech Biomed Engin, 15: 735-744. doi: 10.1080/10255842.2011.558085 [392] Suderman B L, Vasavada A N. 2012. Moving muscle points provide accurate curved muscle paths in a model of the cervical spine. J Biomech, 45: 400-404. doi: 10.1016/j.jbiomech.2011.10.014 [393] Sueda S, Kaufman A, Pai D K. 2008. Musculotendon simulation for hand animation// ACM Transactions on Graphics, 1. [394] Sun K, Xiao B, Liu D, Wang J. 2019. Deep high-resolution representation learning for human pose estimation//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 5693-5703. [395] Sun L, Sun Y, Huang Z, et al. 2018. Improved Hill-type musculotendon models with activation-force-length coupling. Technol Health Care, 26: 909-920. doi: 10.3233/THC-181267 [396] Suwarganda E K, Diamond L E, Lloyd D G, et al. 2019. Minimal medical imaging can accurately reconstruct geometric bone models for musculoskeletal models. Plos One, 14: e0205628. doi: 10.1371/journal.pone.0205628 [397] Synek A, Lu S C, Vereecke E E, et al. 2019. Musculoskeletal models of a human and bonobo finger: parameter identification and comparison to in vitro experiments. PeerJ, 7: e7470. doi: 10.7717/peerj.7470 [398] Szczesny S E, Elliott D M. 2014. Interfibrillar shear stress is the loading mechanism of collagen fibrils in tendon. Acta Biomater, 10: 2582-2590. doi: 10.1016/j.actbio.2014.01.032 [399] Tafazzol A, Arjmand N, Shirazi-Adl A, Parnianpour M. 2014. Lumbopelvic rhythm during forward and backward sagittal trunk rotations: Combined in vivo measurement with inertial tracking device and biomechanical modeling. Clin Biomech, 29: 7-13. doi: 10.1016/j.clinbiomech.2013.10.021 [400] Tang H, Du H, Tang Q, et al. 2014. Chinese patients’ satisfaction with total hip arthroplasty: What is important and dissatisfactory. J Arthroplasty, 29: 2245-2250. doi: 10.1016/j.arth.2013.12.032 [401] Tang Y X, Hu H Y, Tian Q. 2019. Model order reduction based on successively local linearizations for flexible multibody dynamics. Int J Numer Methods Eng, 118: 159-180. [402] Tang Y X, Hu H Y, Tian Q. 2021. A condensed algorithm for adaptive component mode synthesis of viscoelastic flexible multibody dynamics. Int J Numer Methods Eng, 122: 609-637. doi: 10.1002/nme.6552 [403] Thelen D G. 2003. Adjustment of muscle mechanics model parameters to simulate dynamic contractions in older adults. J Biomech Eng, 125: 70. doi: 10.1115/1.1531112 [404] Thelen D G, Anderson F C. 2006. Using computed muscle control to generate forward dynamic simulations of human walking from experimental data. J Biomech, 39: 1107-1115. doi: 10.1016/j.jbiomech.2005.02.010 [405] Thorpe C T, Godinho M S, Riley G P, et al. 2015. The interfascicular matrix enables fascicle sliding and recovery in tendon, and behaves more elastically in energy storing tendons. J Mech Behav Biomed Mater, 52: 85-94. doi: 10.1016/j.jmbbm.2015.04.009 [406] Tresch M C, Cheung V C K, D’Avella A. 2006. Matrix factorization algorithms for the identification of muscle synergies: Evaluation on simulated and experimental data sets. J Neurophysiol, 95: 2199-2212. doi: 10.1152/jn.00222.2005 [407] Tresch M C, Jarc A. 2009. The case for and against muscle synergies. Curr Opin Neurobiol, 19: 601-607. doi: 10.1016/j.conb.2009.09.002 [408] Troyer K L, Puttlitz C M. 2012. Nonlinear viscoelasticty plays an essential role in the functional behavior of spinal ligaments. J Biomech, 45: 684-691. doi: 10.1016/j.jbiomech.2011.12.009 [409] Tsai T Y, Li J S, Wang S, et al. 2015. Principal component analysis in construction of 3D human knee joint models using a statistical shape model method. Comput Methods Biomech Biomed Engin, 18: 721-729. doi: 10.1080/10255842.2013.843676 [410] Tuijt M, Koolstra J H, Lobbezoo F, Naeije M. 2010. Differences in loading of the temporomandibular joint during opening and closing of the jaw. J Biomech, 43: 1048-1054. doi: 10.1016/j.jbiomech.2009.12.013 [411] Valente G, Pitto L, Testi D, et al. 2014. Are subject-specific musculoskeletal models robust to the uncertainties in parameter identification. Plos One, 9: e112625. doi: 10.1371/journal.pone.0112625 [412] Valentini P P. 2012. Human spine using dynamic spline approach for vibrational simulation. J Sound Vib, 331: 5895-5909. doi: 10.1016/j.jsv.2012.07.039 [413] Valentini P P, Pennestrì E. 2011. Modeling elastic beams using dynamic splines. Multibody Syst Dyn, 25: 271-284. doi: 10.1007/s11044-010-9232-9 [414] Valero-Cuevas F J, Cohn B A, Yngvason H F, Lawrence E L. 2015. Exploring the high-dimensional structure of muscle redundancy via subject-specific and generic musculoskeletal models. J Biomech, 48: 2887-2896. doi: 10.1016/j.jbiomech.2015.04.026 [415] Van Der Krogt M M, Bar-On L, Kindt T, et al. 2016. Neuro-musculoskeletal simulation of instrumented contracture and spasticity assessment in children with cerebral palsy. J Neuroeng Rehabil, 13: 64. doi: 10.1186/s12984-015-0109-2 [416] Van Elburg R A J, van Ooyen A. 2010. Impact of dendritic size and dendritic topology on burst firing in pyramidal cells. PLOS Comput Biol, 6: e1000781. doi: 10.1371/journal.pcbi.1000781 [417] Van Hulle R, Schwartz C, Denoël V, et al. 2020. A foot/ground contact model for biomechanical inverse dynamics analysis. J Biomech, 100: 109412. doi: 10.1016/j.jbiomech.2019.109412 [418] Vel Lace K L, Błażkiewicz M. 2021. How does the ski boot affect human gait and joint loading. Biomed Hum Kinet, 13: 163-169. doi: 10.2478/bhk-2021-0020 [419] Vemulapalli R, Arrate F, Chellappa R. 2014. Human action recognition by representing 3d skeletons as points in a Lie group//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR): 588-595. [420] Walter J P, Kinney A L, Banks S A, et al. 2014. Muscle synergies may improve optimization prediction of knee contact forces dring walking. J Biomech Eng, 136: 021031. doi: 10.1115/1.4026428 [421] Walter J R, Günther M, Haeufle D F B, Schmitt S. 2021. A geometry- and muscle-based control architecture for synthesising biological movement. Biol Cybern, 115: 7-37. doi: 10.1007/s00422-020-00856-4 [422] Wang K, McCarter R, Wright J, et al. 1993. Viscoelasticity of the sarcomere matrix of skeletal muscles. The titin-myosin composite filament is a dual-stage molecular spring. Biophys J, 64: 1161-1177. doi: 10.1016/S0006-3495(93)81482-6 [423] Wang K, Wang L, Deng Z, et al. 2019. Influence of passive elements on prediction of intradiscal pressure and muscle activation in lumbar musculoskeletal models. Comput Methods Programs Biomed, 177: 39-46. doi: 10.1016/j.cmpb.2019.05.018 [424] Wang L, Cheung J T M, Pu F, et al. 2011. Why do woodpeckers resist head impact injury: A biomechanical investigation. Plos One, 6: e26490. doi: 10.1371/journal.pone.0026490 [425] Wang W, Wang D, De Groote F, et al. 2020. Implementation of physiological functional spinal units in a rigid-body model of the thoracolumbar spine. J Biomech, 98: 109437. doi: 10.1016/j.jbiomech.2019.109437 [426] Wang X F, Cheng S S, Desai J P. 2018. Design, analysis, and evaluation of a remotely actuated MRI-compatible neurosurgical robot. IEEE Robot Autom Lett, 3: 2144-2151. doi: 10.1109/LRA.2018.2809447 [427] Wang Y, Wang L, Du C, et al. 2016. A comparative study on dynamic stiffness in typical finite element model and multi-body model of C6–C7 cervical spine segment. Int J Numer Method Biomed Eng, 32: e02750. doi: 10.1002/cnm.2750 [428] Wang Y W, Wang L Z, Liu S Y, Fan Y B. 2018. A two-step procedure for coupling development and usage of a pair of human neck models. Comput Methods Biomech Biomed Engin, 21: 413-426. doi: 10.1080/10255842.2018.1471468 [429] Wang Y, Wong D W C, Zhang M. 2016. Computational models of the foot and ankle for pathomechanics and clinical applications: a review. Ann Biomed Eng, 44: 213-221. doi: 10.1007/s10439-015-1359-7 [430] Ward S R, Eng C M, Smallwood L H, Lieber R L. 2009. Are current measurements of lower extremity muscle architecture accurate. Clin Orthop Relat Res, 467: 1074-1082. doi: 10.1007/s11999-008-0594-8 [431] Watters A L, Cope S, Keller M N, et al. 2019. Prevalence of trismus in patients with head and neck cancer: A systematic review with meta-analysis. Head Neck, 41: 3408-3421. doi: 10.1002/hed.25836 [432] Wei G, Tian F, Tang G, Wang C. 2012. A wavelet-based method to predict muscle forces from surface electromyography signals in weightlifting. J Bionic Eng, 9: 48-58. doi: 10.1016/S1672-6529(11)60096-6 [433] Weed D, Maqueda L G, Brown M A, et al. 2010. A new nonlinear multibody/finite element formulation for knee joint ligaments. Nonlinear Dyn, 60: 357-367. doi: 10.1007/s11071-009-9600-2 [434] Weiss J A, Gardiner J C. 2001. Computational modeling of ligament mechanics. Crit Rev Biomed Eng, 29: 303-371. doi: 10.1615/CritRevBiomedEng.v29.i3.20 [435] Whittle M W. 2014. Gait Analysis: An Introduction, 3th edn. Oxford: Butterworth-Heinemann [436] Williams I, Constandinou TG. 2014. Computationally efficient modeling of proprioceptive signals in the upper limb for prostheses: A simulation study. Front Neurosci, 8: 181. doi: 10.3389/fnins.2014.00181 [437] Winter D. 2009. Biomechanics and Motor Control of Human Movement, 4th edn. Hoboken, NJ: John Wiley & Sons. [438] Winters J M. 1990. Hill-based muscle models: A systems engineering perspective//Winters JM, Woo SL-Y (eds) multiple muscle systems: Biomechanics and movement organization. New York: Springer, 69-93. [439] Winters J M. 1995. An improved muscle-reflex actuator for use in large-scale neuromusculoskeletal models. Ann Biomed Eng, 23: 359-374. doi: 10.1007/BF02584437 [440] Winters T M, Takahashi M, Lieber R L, Ward S R. 2011. Whole muscle length-tension relationships are accurately modeled as scaled sarcomeres in rabbit hindlimb muscles. J Biomech, 44: 109-115. doi: 10.1016/j.jbiomech.2010.08.033 [441] Wochner I, Driess D, Zimmermann H, et al. 2020. Optimality principles in human point-to-manifold reaching accounting for muscle dynamics. Front Comput Neurosci, 14: 38. doi: 10.3389/fncom.2020.00038 [442] Xiang Y, Arefeen A. 2020. Two-dimensional team lifting prediction with floating-base box dynamics and grasping force coupling. Multibody Syst Dyn, 50: 211-231. doi: 10.1007/s11044-020-09742-0 [443] Xiang Y, Arora J S, Rahmatalla S, Abdel-Malek K. 2009. Optimization-based dynamic human walking prediction: One step formulation. Int J Numer Methods Eng, 79: 667-695. doi: 10.1002/nme.2575 [444] Xiang Y, Chung H J, Kim J H, et al. 2010. Predictive dynamics: An optimization-based novel approach for human motion simulation. Struct Multidiscip Optim, 41: 465-479. doi: 10.1007/s00158-009-0423-z [445] Xiang Y, Zaman R, Rakshit R, Yang J. 2019. Subject-specific strength percentile determination for two-dimensional symmetric lifting considering dynamic joint strength. Multibody Syst Dyn, 46: 63-76. doi: 10.1007/s11044-018-09661-1 [446] Yamaguchi G T. 2005. Dynamic Modeling of Musculoskeletal Motion: A Vectorized Approach for Biomechanical Analysis in Three Dimensions. Berlin: Springer Science & Business Media. [447] Yao Y, Wang L, Li J, et al. 2020. A novel auxetic structure based bone screw design: Tensile mechanical characterization and pullout fixation strength evaluation. Mater Des, 188: 108424. doi: 10.1016/j.matdes.2019.108424 [448] Yu B, Queen R M, Abbey A N, et al. 2008. Hamstring muscle kinematics and activation during overground sprinting. J Biomech, 41: 3121-3126. doi: 10.1016/j.jbiomech.2008.09.005 [449] Yucesoy C A, Baan G C, Koopman B H F J M, et al. 2005. Pre-strained epimuscular connections cause muscular myofascial force transmission to affect properties of synergistic EHL and EDL muscles of the rat. J Biomech Eng, 127: 819. doi: 10.1115/1.1992523 [450] Yucesoy C A, Koopman B H F J M, Baan G C, et al. 2003. Effects of inter- and extramuscular myofascial force transmission on adjacent synergistic muscles: Assessment by experiments and finite-element modeling. J Biomech, 36: 1797-1811. doi: 10.1016/S0021-9290(03)00230-6 [451] Yucesoy C A, Koopman B H F J M, Grootenboer H J, Huijing P A. 2008. Extramuscular myofascial force transmission alters substantially the acute effects of surgical aponeurotomy: Assessment by finite element modeling. Biomech Model Mechanobiol, 7: 175-189. doi: 10.1007/s10237-007-0084-z [452] Zador A M, Agmon-Snir H, Segev I. 1995. The morphoelectrotonic transform: a graphical approach to dendritic function. J Neurosci, 15: 1669-1682. doi: 10.1523/JNEUROSCI.15-03-01669.1995 [453] Zajac F E. 1989. Muscle and tendon: properties, models, scaling, and application to biomechanics and motor control. Crit Rev Biomed Eng, 17: 359-411. [454] Zanoni A, Cocco A, Masarati P. 2020. Multibody dynamics analysis of the human upper body for rotorcraft–pilot interaction. Nonlinear Dyn, 102: 1517-1539. doi: 10.1007/s11071-020-06005-7 [455] Zatsiorsky V M, Prilutsky B I. 2012. Biomechanics of skeletal muscles. Champaign, IL: Human Kinetics. [456] Zelei A, Krauskopf B, Piiroinen P T, et al. 2019. Stable periodic motion of a controlled segmented leg model of pedal locomotion with inelastic ground-foot collision. Nonlinear Dyn, 97: 1945-1958. doi: 10.1007/s11071-019-04911-z [457] Zelei A, Milton J, Stepan G, et al. 2021. Response to perturbation during quiet standing resembles delayed state feedback optimized for performance and robustness. Sci Rep, 11: 11392. doi: 10.1038/s41598-021-90305-4 [458] Zhang C, Meng X, Anderson D E, et al. 2019a. Effects of stretch reflex on back muscle response during sinusoidal whole body vibration in sitting posture: A model study. Int J Ind Ergon, 71: 103-110. doi: 10.1016/j.ergon.2019.02.005 [459] Zhang C, Wang W, Anderson D E, et al. 2019b. Effect of low-frequency vibration on muscle response under different neurointact conditions. Appl Bionics Biomech, 2019: 1971045. [460] Zhang D, Zhu K. 2007. Modeling biological motor control for human locomotion with functional electrical stimulation. Biol Cybern, 96: 79-97. doi: 10.1007/s00422-006-0107-3 [461] Zhang H, Mo F, Wang L, et al. 2020. A framework of a lower limb musculoskeletal model with implemented natural proprioceptive feedback and its progressive evaluation. IEEE Trans Neural Syst Rehabil Eng, 28: 1866-1875. doi: 10.1109/TNSRE.2020.3003497 [462] Zhang J, Fernandez J, Hislop-Jambrich J, Besier T F. 2016. Lower limb estimation from sparse landmarks using an articulated shape model. J Biomech, 49: 3875-3881. doi: 10.1016/j.jbiomech.2016.10.021 [463] Zhang L, Stepan G, Insperger T. 2018. Saturation limits the contribution of acceleration feedback to balancing against reaction delay. J R Soc Interface, 15: 20170771. doi: 10.1098/rsif.2017.0771 [464] Zhang X, Chen Z, Wang L, et al. 2015. Prediction of hip joint load and translation using musculoskeletal modelling with force-dependent kinematics and experimental validation. Proc Inst Mech Eng Part H J Eng Med, 229: 477-490. doi: 10.1177/0954411915589115 -

 下载:
下载:

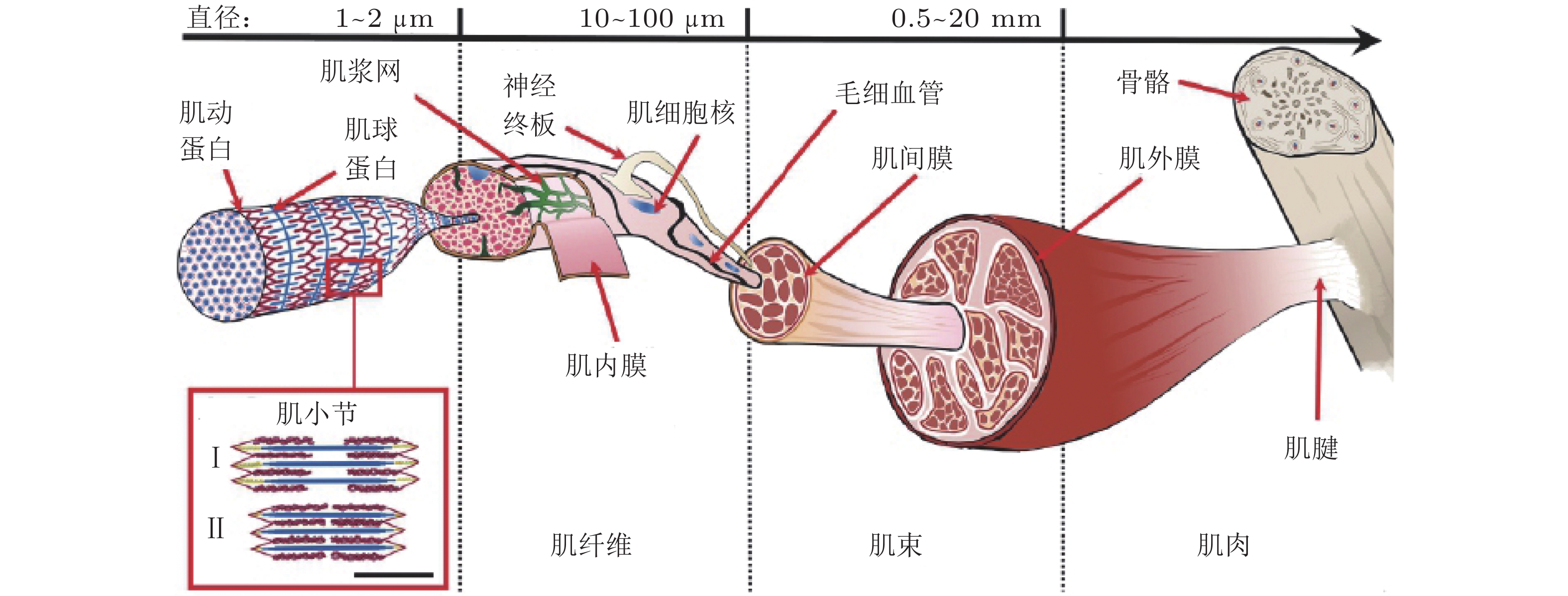












计量
- 文章访问数: 6046
- HTML全文浏览量: 2476
- PDF下载量: 971
- 被引次数: 0
